Yaskawa DR2 Sigma Servo User Manual
Page 478
469
User
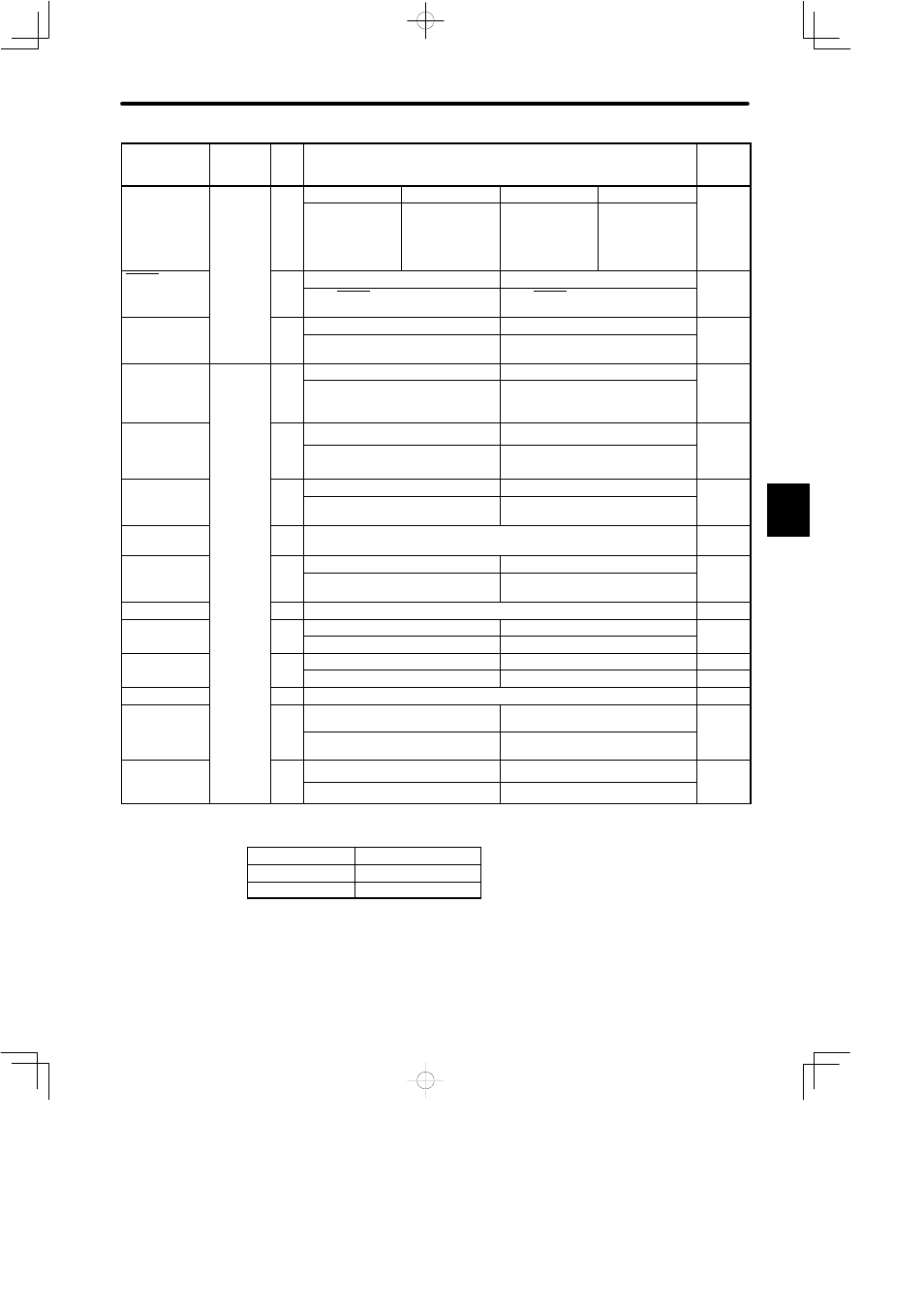
Constant
No.
Bit
No.
Setting
Factory
Setting
Mode switch
l
i
Cn-01
D•C 0•0
0•1
1•0
1•1
0•0
selection
Uses internal
torque reference
as a condition.
(Level setting:
Cn-0C)
Uses speed
reference as a
condition.
(Level setting:
Cn-0D)
Uses
acceleration as a
condition.
(Level setting:
Cn-0E)
Does not use
mode switch
function.
TGON signal
f
i
i h
E
0
1
0
g
function switch
Uses TGON signal as the motor
running detection signal.
Uses TGON signal as the brake
interlock signal.
Torque
f d f
d
F
0
1
0
q
feed-forward
function
Does not use torque feed-forward
function.
Uses torque feed-forward function.
Rotation
di
i
Cn-02
0
0
1
0
direction
selection
Defines counterclockwise (CCW)
rotation as forward rotation.
Defines clockwise (CW) rotation as
forward rotation (reverse rotation
mode).
Home position
error
1
0
1
0
error
processing
selection
Detects home position error (when
absolute encoder is used).
Does not detect home position error.
Contact input
d
l
2
0
1
0
p
speed control
Does not use contact input speed
control.
Uses contact input speed control.
Reserved
3•4
5
Reserved (not to be set)
0
Reserved
6
0
1
0
Uses 1CN #16 pin as the torque
reference monitor.
Uses 1CN #16 pin as the speed
reference monitor.
Reserved
7
Reserved (not to be set)
0
Motor selection
8
0
1
*
SGM motor
SGMP motor
Encoder
l
i
9
0
1
0
selection
Incremental encoder
Absolute encoder
0
Reserved
A
Reserved (not to be set)
0
Selection of
speed/torque
B
0
1
0
speed/torque
or position
control mode
Speed/torque control mode selection Not used.
Torque
reference filter
C
0
1
0
reference filter
type
Primary
Secondary
*
The factory setting depends on the Servopack type as shown below.
Servopack Type
Factory Setting
DR2-j
0
DR2-jP
1
D