Yaskawa DR2 Sigma Servo User Manual
Page 194
4.1 Basic Operations
181
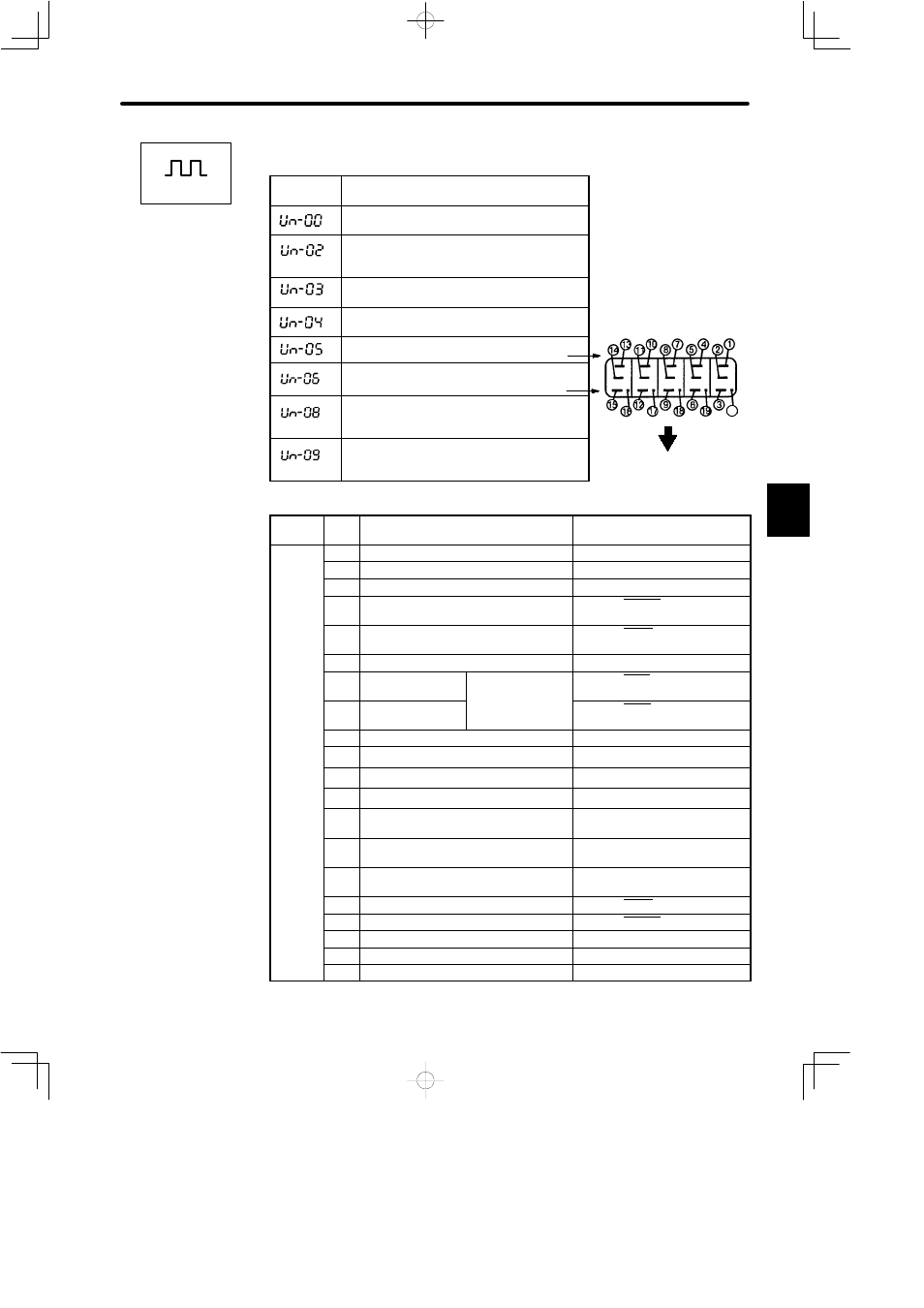
For Position Control
Monitor
Number
Monitor Display
Actual motor speed
Units: r/min
Internal torque reference
Units: %
(with respect to rated torque)
Number of pulses from motor U-phase edge
Units: pulses
Electrical angle
Units: 0.1deg
Internal status bit display
Internal status bit display
Positional error
Units: x1 reference unit (Cn-02 Bit E = 0)
x100 reference unit (Cn-02 Bit E = 1)
Reference pulse counter value
Units: Reference unit
Displays 0 to 65535
Monitor
#
Bit #
Description
Related I/O Signal, User
Constant
Un-05
1
Servo alarm
1CN-31 (ALM)
2
Dynamic brake ON
3
Reverse rotation mode
Cn-02 Bit 0, 2CN-7 (DIR)
4
During motor rotation or brake interlock
signal
1CN-27 (TG-ON), status display
mode
5
Positioning complete
1CN-25 (COIN) , status display
mode
6
Mode switch ON
7
During forward
torque limit
Or contact input
speed control
1CN-45 (P-CL)
8
During reverse
torque limit
speed co o
1CN-46 (N-CL)
9
Motor power ON
10
A-phase
2CN-33(PA), 2CN-34(
*
PA)
11
B-phase
2CN-35(PB), 2CN-36(
*
PB)
12
C-phase
2CN-19(PC), 2CN-20(
*
PC)
13
U-phase
Only when incremental encoder
is used.
14
V-phase
Only when incremental encoder
is used.
15
W-phase
Only when incremental encoder
is used.
16
Servo ON
1CN-40 (S-ON), Cn-01 Bit 0
17
P operation or rotation direction input
1CN-41 (P-CON)
18
Forward overtravel
1CN-42 (P-OT), Cn-01 Bit 2
19
Reverse overtravel
1CN-43 (N-OT), Cn-01 Bit 3
20
Not used
4
Positions
Internal Status
Bit Display
20