A.40 – Yaskawa DR2 Sigma Servo User Manual
Page 407
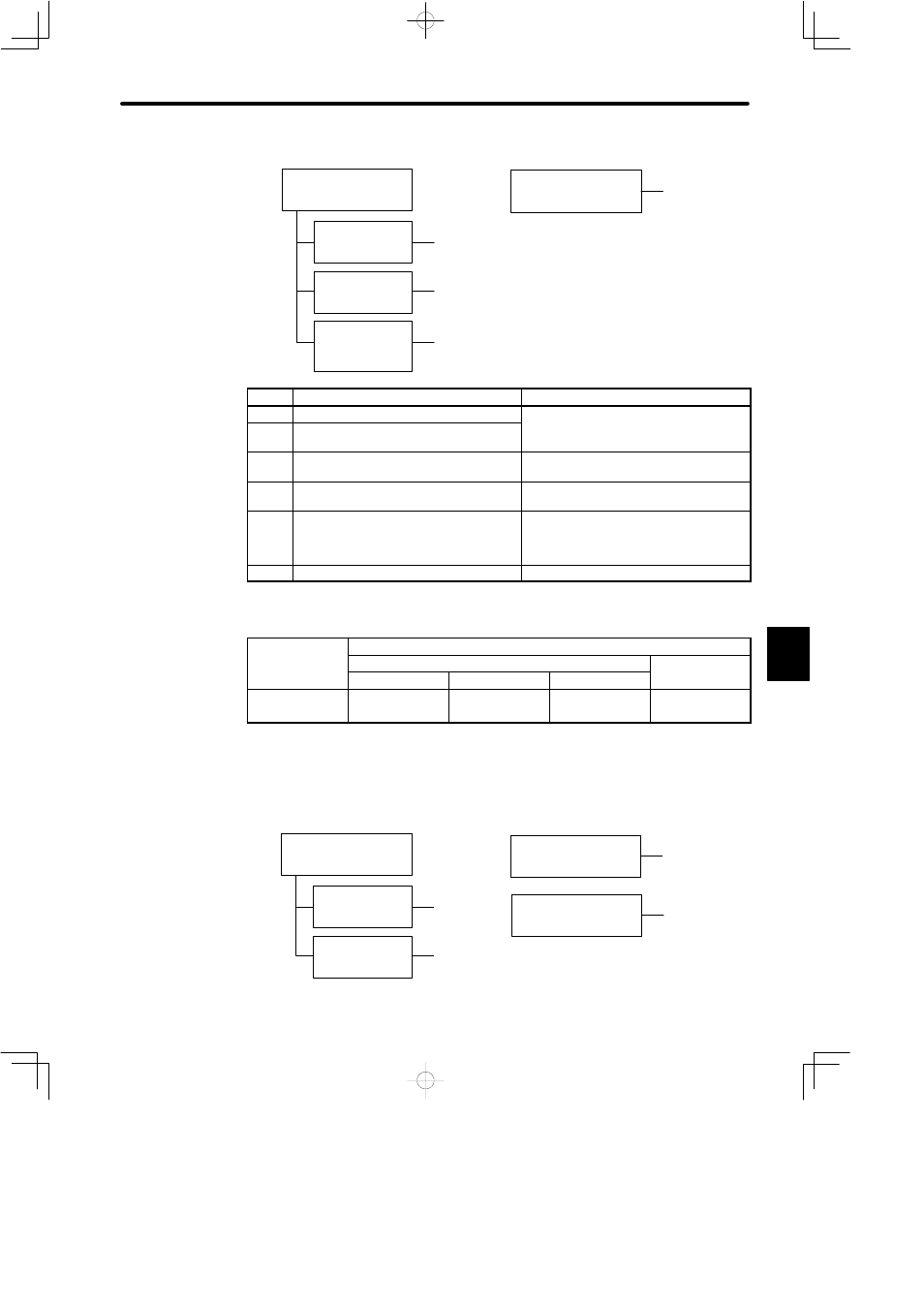
6.2 Troubleshooting
395
Status When Alarm Occurred
A
During servomotor
operation
Overflow during
high-speed opera-
tion
No feedback pulse
returned after refer-
ence pulse input.
Normal operation
but overflow when
large reference in-
put.
At control power ON
B
,
F
C
,
D
,
E
F
Cause
Remedy
A
Servomotor wiring incorrect.
Check and correct wiring. (Check A-, B-,
C h
l
2CN )
B
Encoder wiring incorrect (disconnection,
short, power supply, etc.)
g (
,
,
C-phase pulses correct at 2CN.)
C
Servopack adjustment incorrect
Increase speed loop gain (Cn-04) and/or
position loop gain (Cn-1A).
D
Servomotor overloaded
Reduce load torque and inertia. Otherwise,
replace with larger capacity servomotor.
E
Position reference pulse frequency too
high
• Decrease reference pulse frequency.
• Use smoothing function.
• Change electronic gear ratio.
F
Circuit board (1PWB) defective.
Replace Servopack.
D
Display and Outputs
Digital Operator
Di l
d
Alarm Output
g
p
Display and
Alarm Name
Alarm Code Output
Alarm Output
Alarm Name
ALO1
ALO2
ALO3
p
A.40
Overvoltage
OFF
OFF
ON
OFF
OFF: Output transistor is OFF
ON: Output transistor is ON
Status When Alarm Occurred
A
, D
During servomotor
operation
During motor
deceleration
During normal
operation
At main circuit power ON
B
,
C
, D
E
At control power ON
F
6