Yaskawa DR2 Sigma Servo User Manual
Page 484
475
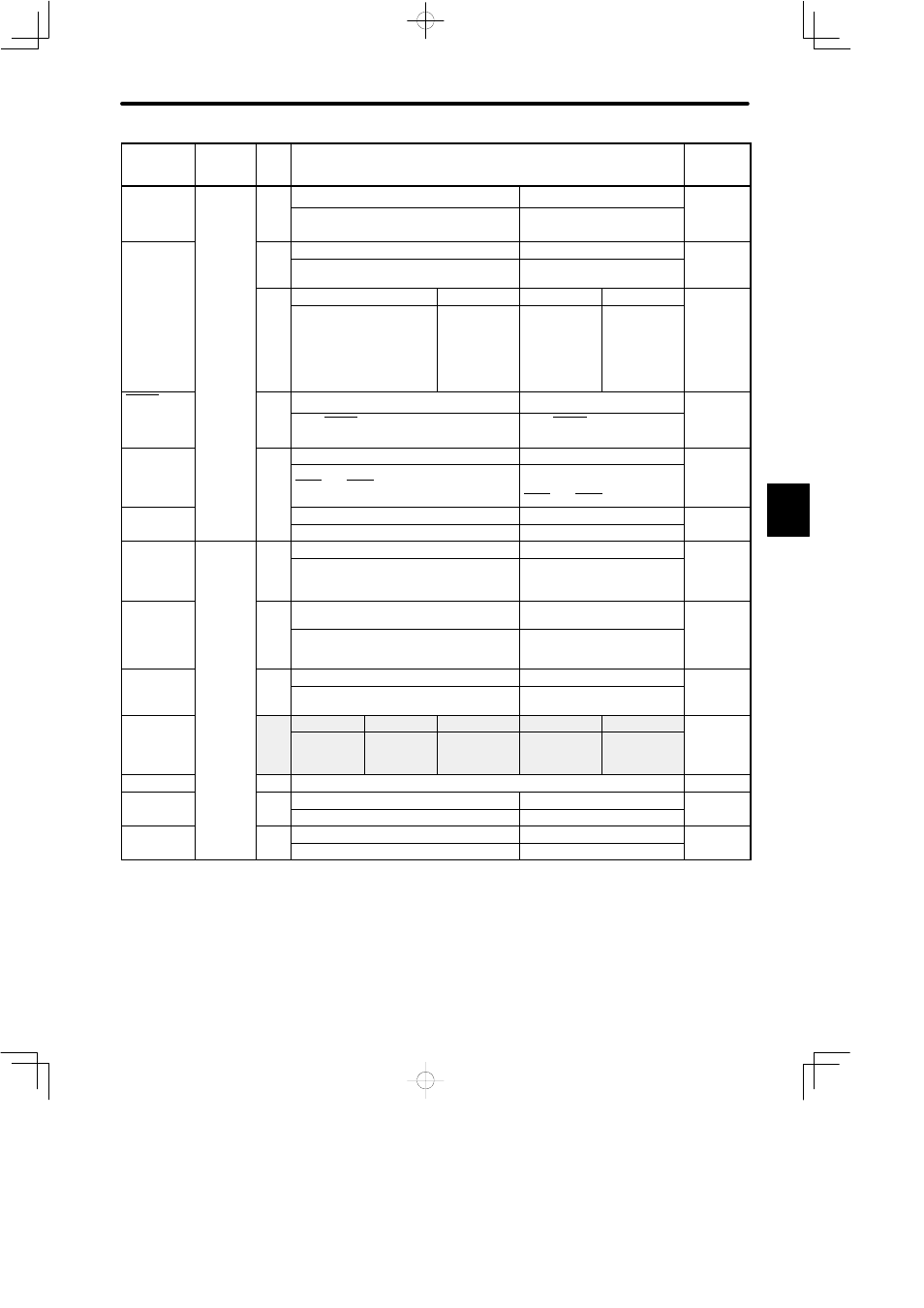
User
Constant
No.
Bit
No.
Setting
Factory
Setting
Operation
performed
Cn-01
A
0
1
0
performed
at servo
OFF
Clears error pulse when servo is turned
OFF.
Does not clear error pulse
when servo is turned OFF.
Mode
i h
B
0
1
0
switch
selection
Uses mode switch function as set in bits D
and C of Cn-01.
Does not use mode switch
function.
D•C 0•0
0•1
1•0
1•1
0•0
Uses internal torque
reference as a condition.
(Level setting: Cn-0C)
Uses speed
reference as
a condition.
(Level setting:
Cn-0D)
Uses
acceleration
as a
condition.
(Level setting:
Cn-0E)
Uses error
pulse as a
condition.
(Level setting:
Cn-0F)
TGON
signal
E
0
1
0
signal
function
switch
Uses TGON signal as the motor running
detection signal.
Uses TGON signal as the
brake interlock signal.
Contact
i
d
F
0
1
0
S
input speed
selection
Stops the motor when both contact signals
P-CL and N-CL are OFF.
Receives pulse reference
when both contact signals
P-CL and N-CL are OFF.
See note
1
INHIBIT
f
i
0
1
0
function
Always receives pulse reference.
Enables INHIBIT function.
Rotation
di
i
Cn-02
0
0
1
0
direction
selection
Defines counterclockwise (CCW) rotation
as forward rotation.
Defines clockwise (CW)
rotation as forward rotation
(reverse rotation mode).
Home
position
1
0
1
0
position
error
processing
selection
Detects home position error (when
absolute encoder is used).
Does not detect home position
error.
Contact
i
d
2
0
1
0
input speed
control
Does not use contact input speed control.
Uses contact input speed
control.
Reference
l
f
5•4• 0•0•0
0•0•1
0•1•0
0•1•1
1•0•0
0•0•0
pulse form
selection
3
Sign +
Pulse
CW + CCW Phase A +
Phase B (x 1
multiplication)
Phase A +
Phase B (x 2
multiplication)
Phase A +
Phase B (x 4
multiplication)
Reserved
7•6
Reserved (not to be used)
0
Motor
l
i
8
0
1
See note
2
selection
SGM motor
SGMP motor
2
Encoder
l
i
9
0
1
0
selection
Incremental encoder
Absolute encoder
D