Output → tgon+ 1cn-27, Output → tgon- 1cn-28 – Yaskawa DR2 Sigma Servo User Manual
Page 124
3.4 Setting Stop Mode
111
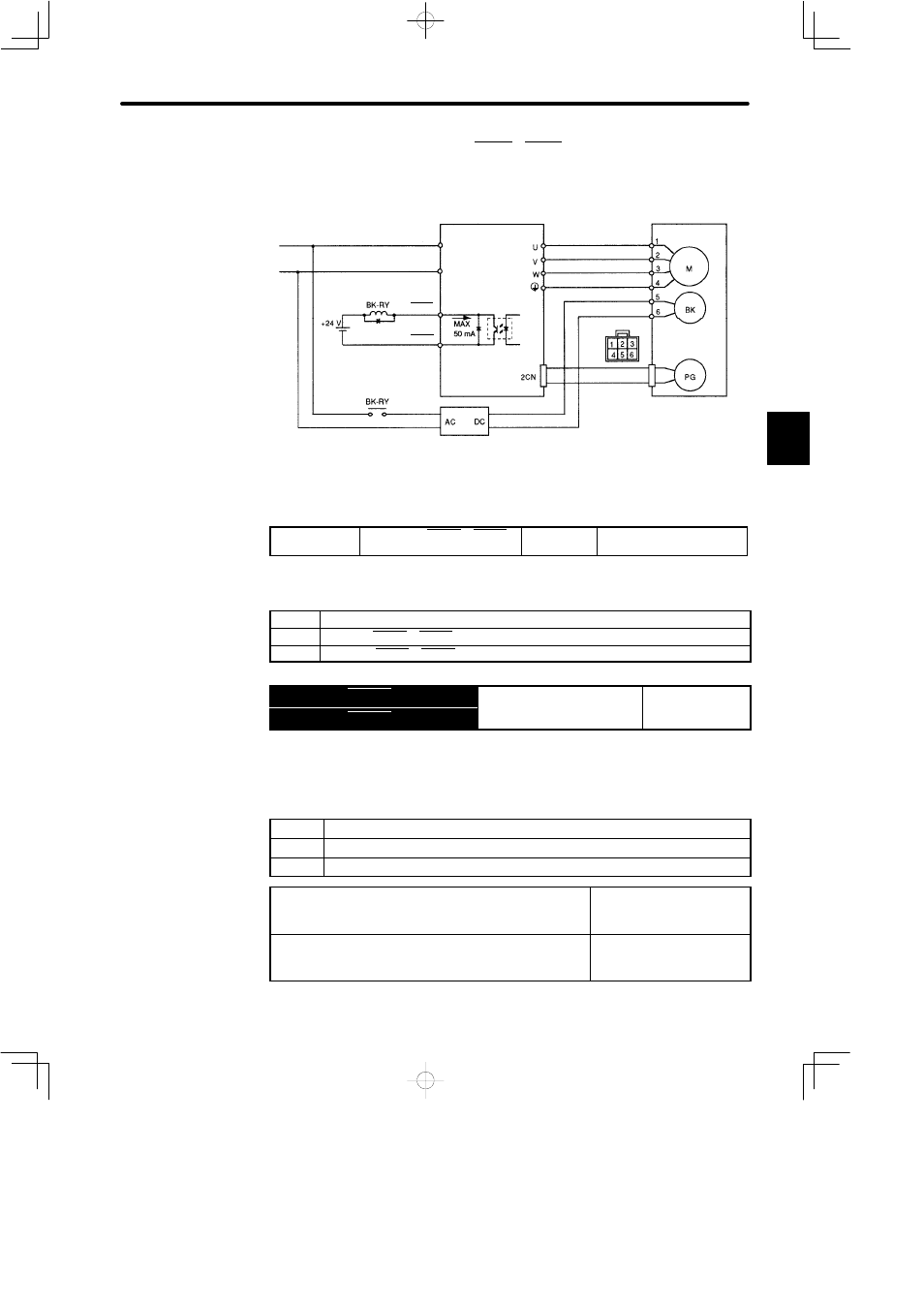
2) Use Servopack contact output-signal TGON+, TGON- and brake power supply to form a
brake ON/OFF circuit.
An example of standard wiring is shown below.
Power supply
Servopack
Servomotor with brake
Motor plug
Blue or
yellow
Red
White
Black
Brake power supply
BK-RY: Brake control relay
Brake power supply has two types (200 V, 100 V).
TGON-
TGON+
L
N
1CN-27
1CN-28
Set the following memory switch to select the brake interlock output.
Cn-01
Bit E
Selection of TGON+, TGON-
Signals
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Set bit E of Cn-01 to 1 to select the brake interlock output.
Setting
Meaning
0
Uses the TGON+, TGON- signals as the running output.
1
Uses the TGON+, TGON- signals as the brake interlock output.
Output → TGON+ 1CN-27
Brake Interlock Output, etc.
For Speed/Torque
Control and
Output → TGON- 1CN-28
Control and
Position Control
This output signal controls the brake when a motor with brake is used. This signal termi-
nal need not be connected when a motor without brake is used.
Related User Constants
Cn-12
Time delay from brake signal until servo OFF
Cn-15
Speed level for brake signal output during operation
Cn-16
Output timing of brake signal during motor operation
ON Status:
Circuit between 1CN-27 and 1CN-28 is closed.
1CN-27 is at low level.
Releases the brake.
OFF Status:
Circuit between 1CN-27 and 1CN-28 is open.
1CN-27 is at high level.
Applies the brake.
3