Yaskawa DR2 Sigma Servo User Manual
Page 170
3.8 Special Wiring
157
• Use the following user constant to set the pulse dividing ratio.
Cn-0A
PGRAT
Dividing Ratio
Setting
Unit: P/R
Setting Range:
16 to Number
of Encoder
Pulses
Factory
Setting:
2048
For Speed/Torque
Control and
Position Control
Set the number of output pulses for PG output
signals (PAO,
*
PAO, PBO and
*
PBO).
Pulses from motor encoder (PG) are divided
by the preset number of pulses before being
output.
The number of output pulses per revolution is
set in this user constant. Set this value accord-
ing to the reference unit of the machine or con-
troller to be used.
The setting range varies according to the en-
coder used.
Motor Type
Number of Encoder Pulses Per
Revolution
Setting Range
SGM-jjj31j
SGMP-jjj31j
Incremental encoder: 2048 pulses
per revolution
16 to 2048
SGM-jjjW1j
SGMP-jjjW1j
Absolute encoder: 1024 pulses per
revolution
16 to 1024
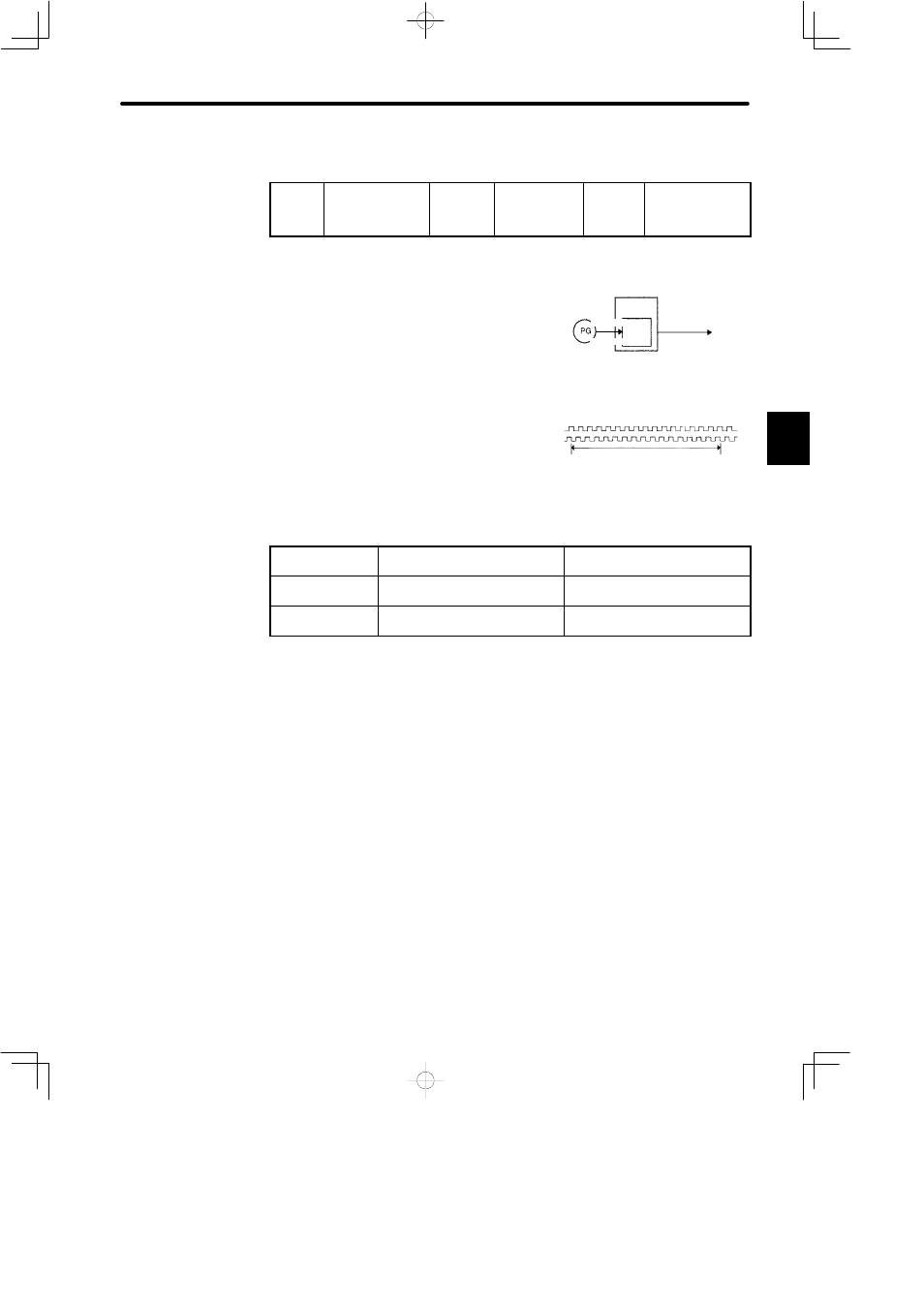
3
Servomotor
encoder
Servopack
Output terminals:
PAO (1CN-33)
*PAO (1CN-34)
PBO (1CN-35)
*PBO (1CN-36)
Setting example:
Preset value: 16
1 revolution
Phase A
Phase A
Phase B
Phase B
Output
Fre-
quency
divider