Applications of σ -series products – Yaskawa DR2 Sigma Servo User Manual
Page 137
APPLICATIONS OF Σ-SERIES PRODUCTS
3.6.6 Using Mode Switch cont.
124
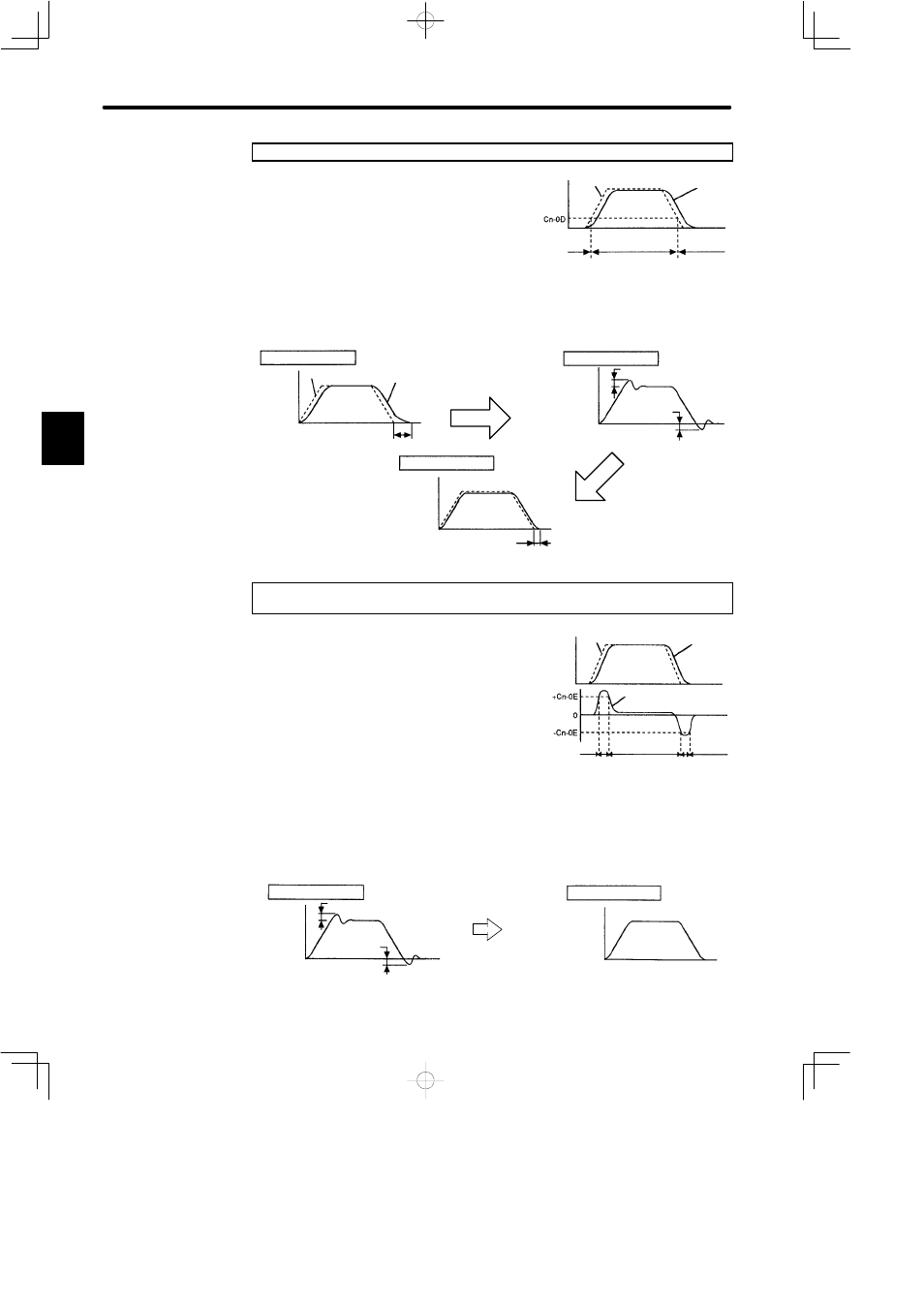
When Speed Reference Is Used as a Detection Point of Mode Switch
If a speed reference exceeds the value set in user
constant Cn-0D, the speed loop switches to P
control.
Example of Use:
The mode switch is used to reduce settling time.
Generally, speed loop gain must be increased to reduce settling time. Using the
mode switch suppresses the occurrence of overshoot and undershoot when
speed loop gain is increased.
Without mode switch
Speed reference
Motor
speed
Motor speed
Settling time is long
Increase speed loop gain
Without mode switch
Motor
speed
Overshoot
Undershoot
Time
With mode switch
Motor
speed
Settling time
Suppress the occurrence
of overshoot and
undershoot.
When Acceleration Is Used as a Detection Point of Mode
Switch
If motor acceleration exceeds the value set in user
constant Cn-0E, the speed loop switches to P
control.
Example of Use:
If a mode switch is not used and PI control is always performed, torque may
enter a saturation state during acceleration or deceleration, causing the motor
speed to have overshoot or undershoot.
Using the mode switch suppresses torque saturation and prevents the motor
speed from having overshoot and undershoot.
Without mode switch
Motor
speed
Overshoot
Undershoot
Time
With mode switch
Motor
speed
Time
3
Speed
Speed reference
Motor
speed
PI control
P control
PI control
Speed
Reference
speed
Motor speed
Motor
acceleration
Acceleration
reference
PI control
P control
P control
PI control
PI control