Yaskawa DR2 Sigma Servo User Manual
Page 437
DIFFERENCES BETWEEN DR2 AND DR1, SGDA AND SGD SERVOPACKS
426
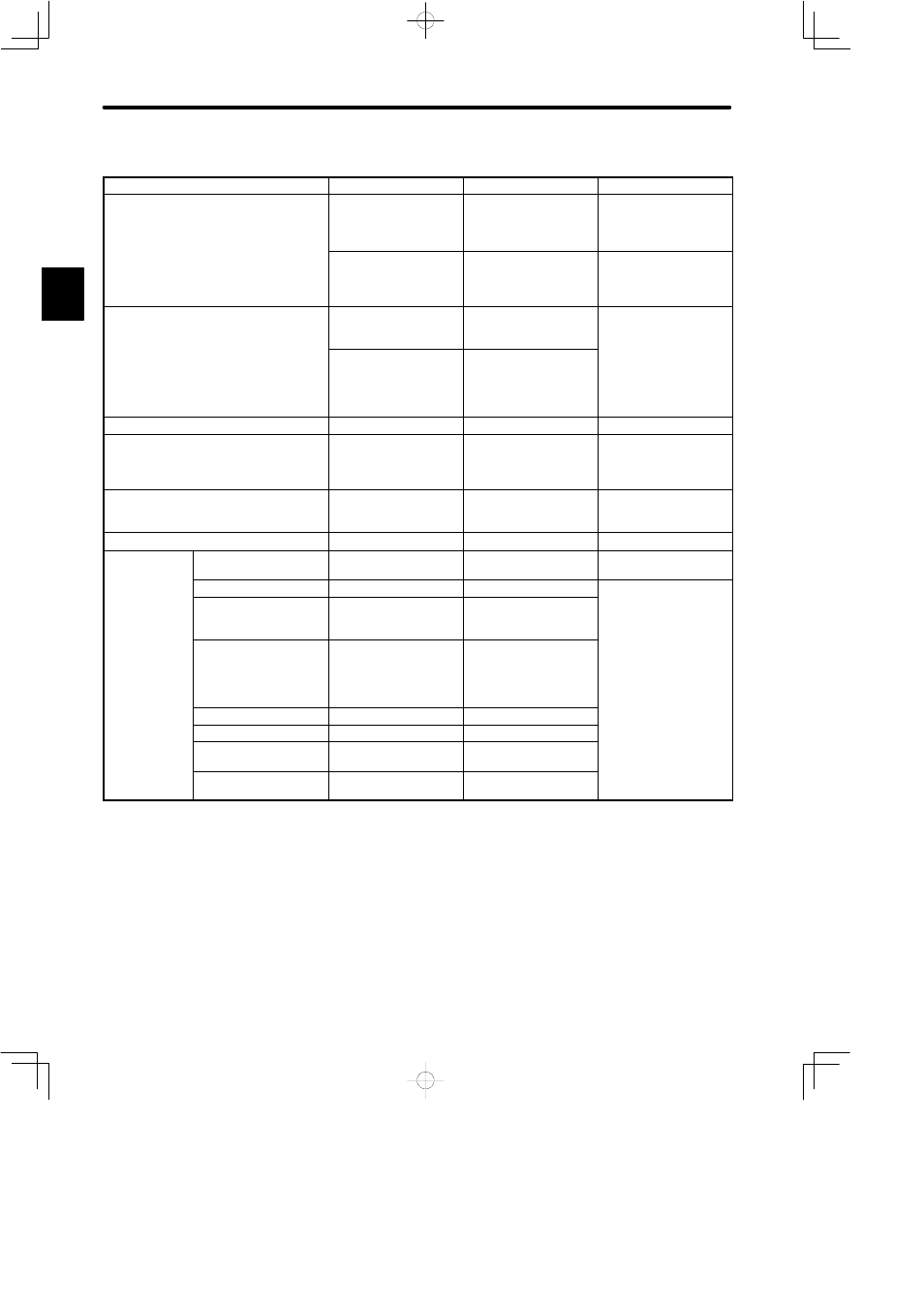
Comparison of the DR2 Servopack with the DR1 Servopack (2)
Item
DR2 Servopack
DR1 Servopack
Remarks
Type
DR2-jjAC
(Semi-closed type)
DR2-jjAC-F
(Full-closed type)
DR1-jjAC
(Incremental type)
DR1-jjAA
(Absolute type)
As for DR2, factory
setting of applicable
motor is SGM
Servomotor.
DR2-jjACP
(Semi-closed type)
DR2-jjACP-F
(Full-closed type)
−
Factory setting of
applicable motor is
SGMP Servomotor.
Outside Dimensions
60W ×250H ×204D
(200V: 30W to 200W)
(100V: 30W to 100W)
60W ×250H ×250D
(200V: 30W to 200W)
(100V: 30W to 100W)
Mounting hole position
is in common with DR2
and DR1.
75W ×250H ×252D
(200V: 400W and
750W)
(100V: 200W and
300W)
75W ×250H ×250D
(200V: 400W and
750W)
(100V: 200W)
Base-mount type
Option
No
Motor Terminals
External terminals in
conformance with
Standard
(PHOENIX CONTACT)
External terminal
(M4 screw)
Encoder Connector 2CN
MR-20RMA
MR-20RMA
Common with DR2 and
DR1. (Different from
SGD type)
Connector 4CN for Full-closed Type
MR-8RMA
−
External I/O
Signals
Used Connector
MR-50RFA
MR-50RFA
Common with DR2 and
DR1.
S g a s
(1CN)
3-pin
PL1: PULS pull-up
SG: Signal ground
PL1, 2 and 3 are used
f
ll
f
5-pin
V-REF: Exclusive for
speed reference
input
IN-A: Main input
,
for pull-up of open
collector input.
Signals other than
9-pin
T-REF: Exclusive for
torque
reference
input
IN-B: Auxiliary input
Signals other than
described here are used
in common with DR2
and DR1.
13-pin
PL2: SIGN pull-up
SG: Signal ground
18-pin
PL3: CLR pull-up
SG: Signal ground
23-pin
+15V: Reference power
supply 30mA
PHC: Phase-C open
collector
24-pin
-15V: Reference power
supply 30mA
SG: Signal ground
A