Yaskawa DR2 Sigma Servo User Manual
Page 248
SERVO SELECTION AND DATA SHEETS
5.3.1 Ratings and Specifications cont.
236
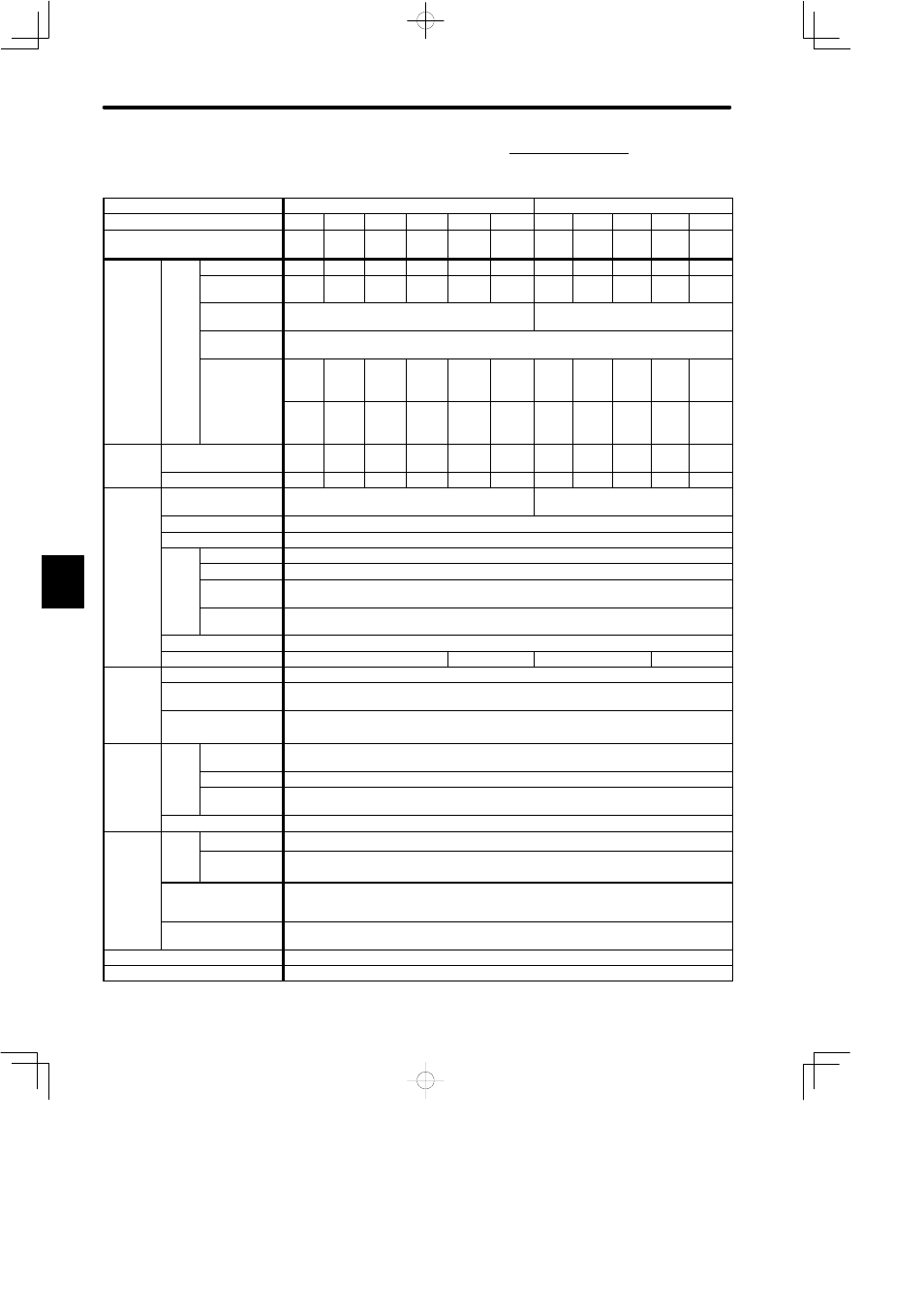
3) Ratings and Specifications of DR2 Servopack for Position Control
Voltage
200 VAC
100 VAC
Servopack Type
DR2- A3AC
A5AC
01AC
02AC
04AC
08AC
A3BC
A5BC
01BC
02BC
03BC
Max. Applicable Motor Capacity
W (HP)
30
(0.04)
50
(0.07)
100
(0.13)
200
(0.27)
400
(0.53)
750
(1.01)
30
(0.04)
50
(0.07)
100
(0.13)
200
(0.27)
300
(0.40)
Combined
S
ifi
Motor
Type
A3Aj A5Aj
01Aj
02Aj
04Aj
08Aj
A3Bj A5Bj 01Bj 02Bj 03Bj
Specifica-
tions
Motor Capacity
W (HP)
30
(0.04)
50
(0.07)
100
(0.13)
200
(0.27)
400
(0.53)
750
(1.01)
30
(0.04)
50
(0.07)
100
(0.13)
200
(0.27)
300
(0.40)
Rated/ Max.
Motor Speed
3000/4500 r/min
3000/4500 r/min
Applicable
encoder
Incremental encoder 2048 P/R, absolute encoder 1024 P/R
Allowable Load
Inertia*
1
J
L
kg¡m
2
¢
10
−4
(oz in s
2
¢
10
−3
)
0.63
(8.80)
0.78
(11.0)
1.20
(17.0)
3.69
(52.2)
5.73
(81.1)
20.1
(284.6)
0.63
(8.80)
0.78
(11.0)
1.20
(17.0)
3.69
(52.2)
5.73
(81.1)
(oz¡in¡s
2
¢
10
−3
)
SGM (Upper)/
SGMP (Lower)
−
−
1.95
(27.6)
6.27
(88.8)
10.41
(147.4)
18.5
(262.0)
−
−
1.95
(27.6)
6.27
(88.8)
10.41
(147.4)
Combined
Specifica-
ti
Continuous Output
Current*
7
0.42
0.6
0.87
(0.89)
2.0
2.6
4.4
(4.1)
0.63
0.90
2.2
2.7
3.7
(4.3)
p
tions
Max. Output Current
1.3
1.9
2.8
6.0
8.0
13.9
2.0
2.9
7.1
8.4
14.8
Basic
Specifica-
ti
Power Supply
(Main/control circuit)
Single-phase 200 to 230 VAC, +10% to −15%,
50/60 Hz*
2
Single-phase 100 to 115 VAC*
2
, +10% to
−15%, 50/60 Hz
p
tions
Control Method
Single-phase, full-wave rectification IGBT-PWM (sine-wave driven)
Feedback
Incremental encoder 2048 P/R, absolute encoder 1024 P/R
Loca-
i
Ambient Temp.
0 to 55°C*
3
tion
Storage Temp.
−20°C to +85°C
Ambient/Stor-
age Humidity
90% or less (with no condensation)
Vibration/Shock
Resistance
0.5/2G
Structure
Rack-mounted*
5
Approx. Mass
kg (lb)
2.5 (5.51)
3.7 (8.16)
2.5 (5.51)
3.7 (8.16)
Perfor-
Bias Setting
0 to 450 r/min. (Setting resolution: 1 r/min.)
mance
Feed Forward
Compensation
0 to 100% (Setting resolution: 1%)
Position Complete Width
Setting
0 to 250 reference units.
Reference unit: minimum unit of position data which moves load
Input
Signal
Refer-
ence
P l
Type
SIGN + PULSE train, 90° phase difference 2-phase pulse, (A-phase+B-phase), CCW pulse+CW
pulse
g
Pulse
Pulse Form
Line driver (+5 V level), open collector (+5 V or +12 V level)
Pulse
Frequency
0 to 450 kpps
Control Signal
CLEAR (input pulse form identical to reference pulse)
I/O
Signals
Posi-
tion
Output Form
A-, B-, C-phase line driver*
6
Signals
tion
Out-
put
Frequency
Dividing Ratio
(16 to N) /N (N=2048, 1024)*
4
Sequence Input
Servo ON, P drive (or motor forward/reverse by internal speed setting), forward run stop (P-OT),
reverse run stop (N-OT), alarm reset, current limit + selection (or internal speed selection), current
limit − selection (or internal speed selection)
Sequence Output
Positioning complete, motor running output (or external brake interlock), servo ready, servo alarm,
3-bit alarm codes
Dynamic Brake
Operated at main power OFF, servo alarm or overtravel.
External Regenerative Unit
Required when exceeding the allowable load inertia
5