Yaskawa DR2 Sigma Servo User Manual
Page 126
3.4 Setting Stop Mode
113
5) Set the following user constants to adjust brake ON timing so that holding brake is applied
when the motor stops.
Cn-15
BRKSPD
Speed Level at which
Brake Signal Is Output
during Motor Operation
Unit:
r/min
Setting
Range:
0 to
Maximum
Speed
Factory
Setting:
100
For
Speed/Torque
Control and
Position
Control
Cn-16
BRKWAI
Output Timing of Brake
Signal during Motor
Operation
Unit:
10 ms
Setting
Range: 10
to 100
Factory
Setting:
50
For
Speed/Torque
Control and
Position
Control
Cn-15 and Cn-16 are used for SGM/SGMP Ser-
vomotors with brake. Use these user constants to
set brake timing used when the servo is turned
OFF by input signal S-ON (1CN-40) or alarm oc-
currence during motor rotation.
Since brakes for SGM/SGMP Servomotors are
designed as holding brakes, if brake is applied at
motor running, brake generates excessive fric-
tion. Therefore, brake ON timing when the motor
stops must be appropriate. Adjust the user
constant settings while observing machine opera-
tion.
• Conditions for TGON+ signal (1CN-27) output
during motor operation. The circuit between
1CN-27 and 1CN-28 is opened in either of the
following situations.
1
Motor speed drops below the value set in Cn-15 (BRKSPD) after servo OFF occurs.
2
The time set in Cn-16 (BRKWAI) has elapsed since servo OFF occurred.
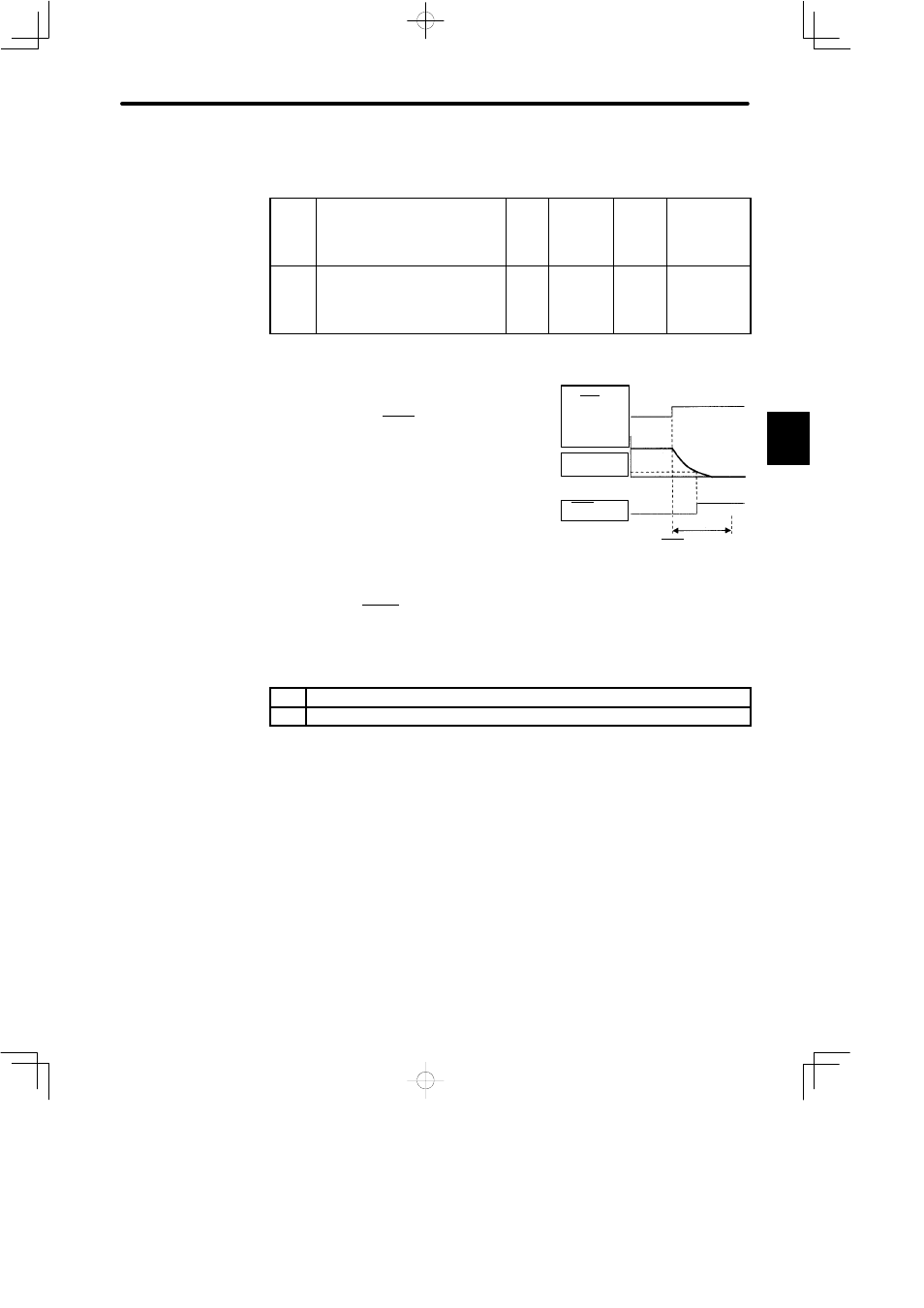
3
Brake Timing when Motor is in Stopped Status
Power OFF
by S-ON input
(1CN-40) or
alarm
occurrence
and main
power OFF
Servo ON
Servo OFF
Motor speed
(r/min)
Stop by dynamic
brake or coasting
to a stop (Cn-01
bit 6)
BRKSPD
(Cn-15)
TGON+ output
(1CN-27)
Release
brake
Apply brake
BRKWAI
(Cn-16)
When this time elapses, TGON+ signal is
output.