Yaskawa DR2 Sigma Servo User Manual
Page 21
1.1 Basic Understanding of AC Servos
7
(2) Servomotor
(a) DC Servomotor and AC Servomotor
Servomotors are divided into two types: DC servomotors and AC servomotors.
DC servomotors are driven by direct current (DC). They have a long history. Up
until the 1980s, the term “servomotor” used to imply a DC servomotor.
From 1984, AC servomotors were emerging as a result of rapid progress in micro-
processor technology. Driven by alternating current (AC), AC servomotors are
now widely used because of the following advantages:
• Easy maintenance:
No brush
• High speed:
No limitation in rectification rate
Note however that servomotors and Servopacks use some parts that are subject
to mechanical wear or aging. For preventive maintenance, inspect and replace
parts at regular intervals.
For details, refer to Chapter 6 Inspection, Maintenance, and Troubleshooting.
(b) AC Servomotor
AC servomotors are divided into two types: synchronous type and induction type.
The synchronous type is more commonly used.
For a synchronous type servomotor, motor speed is controlled by changing the
frequency of alternating current.
A synchronous type servomotor provides strong holding torque when stopped, so
this type is ideal when precise positioning is required. Use this type for a servo
mechanism for position control.
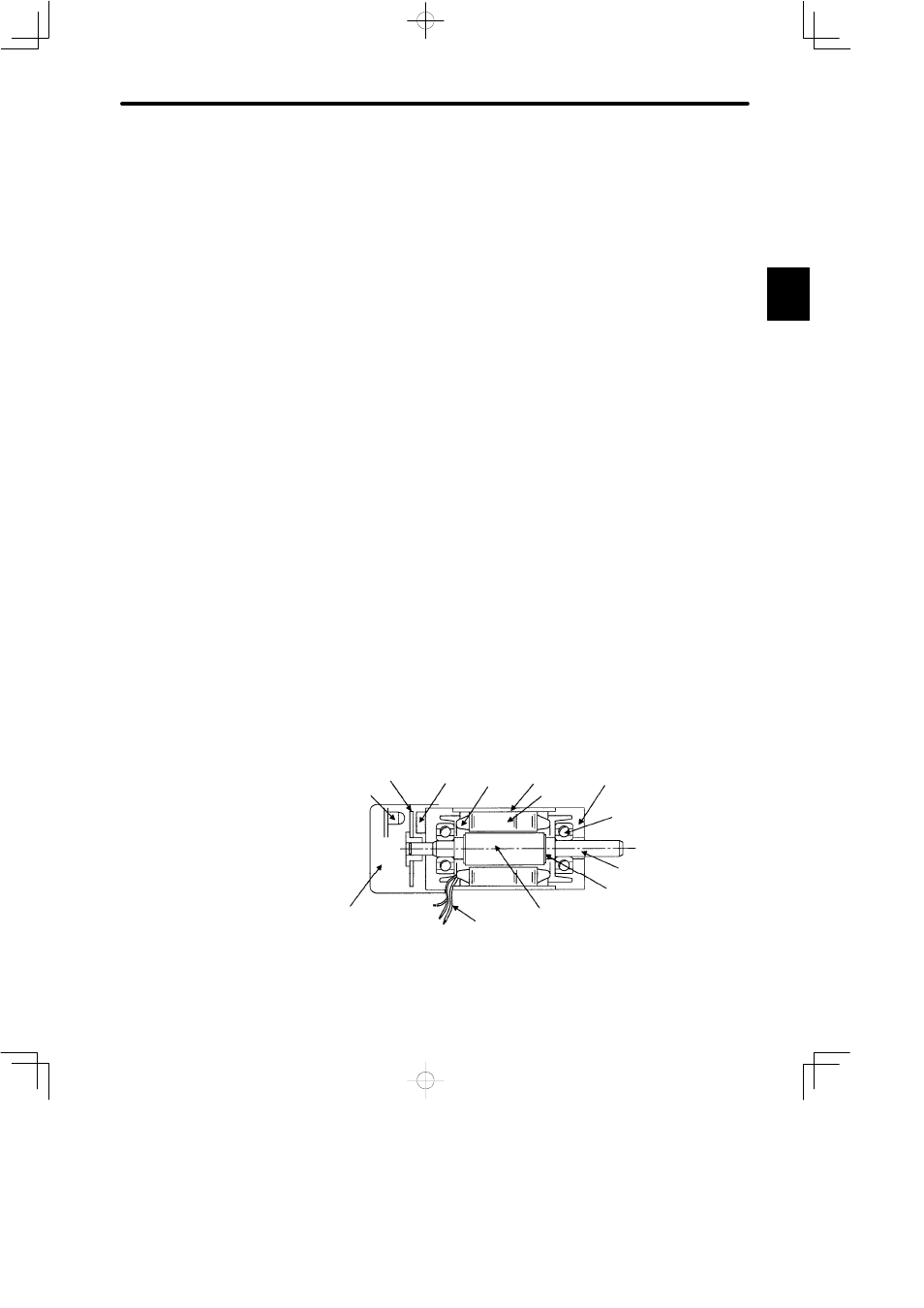
The following figure illustrates the structure of a synchronous type servomotor:
Light-emitting
element
Rotary disc
Light-receiving
element
Armature
wire
Housing
Stator core
Front cap
Ball bearing
Shaft
Rotor core
Magnet
Lead wire
Position detector
(encoder)
Yaskawa SGM and SGMP Servomotors are of the synchronous type.
1