Encoders – Rockwell Automation 999 IMC S Class Compact Motion Controller (Cat. No. 4100-999-122) User Manual
Page 32
3-2
Technical Overview
Publication 999-122 - January 1997
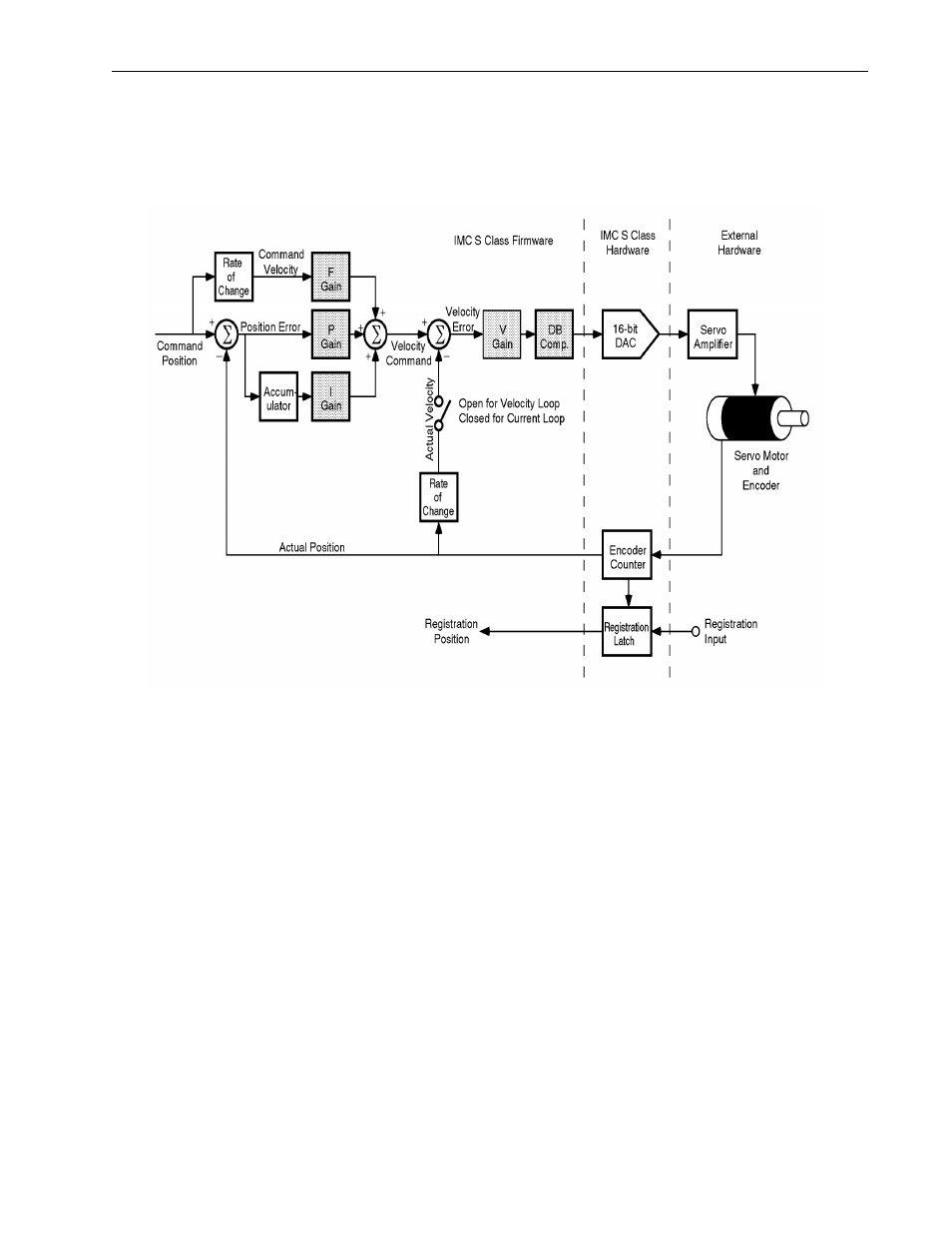
A functional block diagram of the Nested Digital Servo Loop is shown
below. The following sections discuss, in detail, each block in this
diagram.
Encoders
The IMC-S/23x interfaces to rotary or linear quadrature-type
incremental encoders to provide both position and velocity feedback.
The most common type of such encoders are optical; they utilize a light
source and an alternately clear and opaque disc or scale to generate
their output.
When operating at a fixed speed, quadrature-type incremental encoders
generate two square wave outputs, usually referred to as Channel A and
Channel B, which are approximately 90° out of phase with one another.
Proper phasing of these two channels can be checked by driving the
encoder at a fixed speed and displaying the two encoder outputs on a
dual channel oscilloscope.
Encoders are available with a variety of different output driver
configurations. The IMC-S/23x interfaces directly to differential line
driver encoders providing TTL (5V) level signals. In addition, the
encoder inputs are optically isolated and powered from a separate power
supply contained within the IMC-S/23x. Encoder loss circuitry detects
when any of the encoder connections have broken.