Velocity gain, Proportional gain, Integral gain – Rockwell Automation 999 IMC S Class Compact Motion Controller (Cat. No. 4100-999-122) User Manual
Page 139
Understanding IMC-S/23x Setups
5-59
Publication 999-122 - January 1997
Velocity Gain
When using a torque (current) loop servo amplifier, the synthesized
velocity loop provides damping without the requirement for an analog
tachometer. Increasing the velocity gain (V gain) results in smoother
motion, enhanced acceleration, reduced overshoot, and greater system
stability. The velocity loop also allows higher effective proportional
gain values to be used, however, too much V gain leads to high
frequency instability. The velocity loop in the motion controller is not
used with velocity loop servo amplifiers, but the V gain must still be
set properly. Note that millivolts per count per millisecond is equivalent
to millivolts per 1000 (k) counts per second.
Proportional Gain
Increasing the proportional gain (P gain) decreases response time and
increases the "stiffness" of the servo system. Under pure proportional
control, the drive system applies a restoring torque in proportion to the
position error of the axis. Too high a proportional gain results in
instability, while too low a proportional gain results in "loose" or
"sloppy" system dynamics.
Integral Gain
Integral gain (I gain) improves the steady-state positioning performance
of the system. By using integral gain, it is possible to achieve accurate
axis positioning despite the presence of such disturbances as static
friction or gravity. Increasing the integral gain generally increases the
ultimate positioning accuracy of the system. Excessive integral gain,
however, results in system instability.
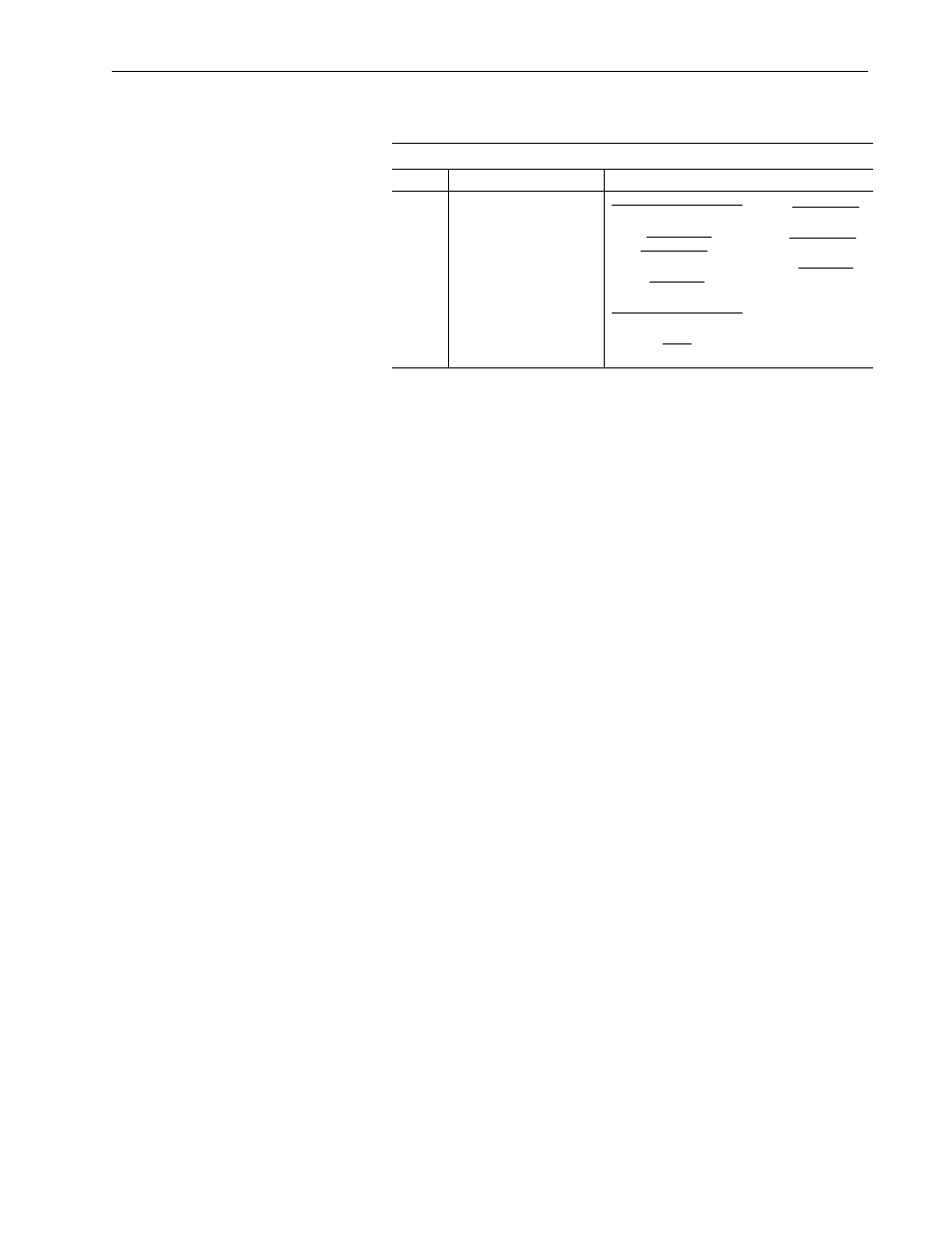
IMC-S/23x Servo Gain Units
Gain
Description
Units
P
I
V
F
Proportional Gain
Integral Gain
Velocity Gain
Feedforward Gain
Deadband Compensation
Offset Compensation
Counts per Millisecond
Count of Error
Counts per
Millisecond
2
Count of Error
Millivolts
Count per Millisecond
Counts per Millisecond
Count per Millisecond
Volts
Volts
or
or
or
1
Millisecond
1
Millisecond
2
Millivolts
kCPS