Rockwell Automation 999 IMC S Class Compact Motion Controller (Cat. No. 4100-999-122) User Manual
Page 111
Understanding IMC-S/23x Setups
5-31
Publication 999-122 - January 1997
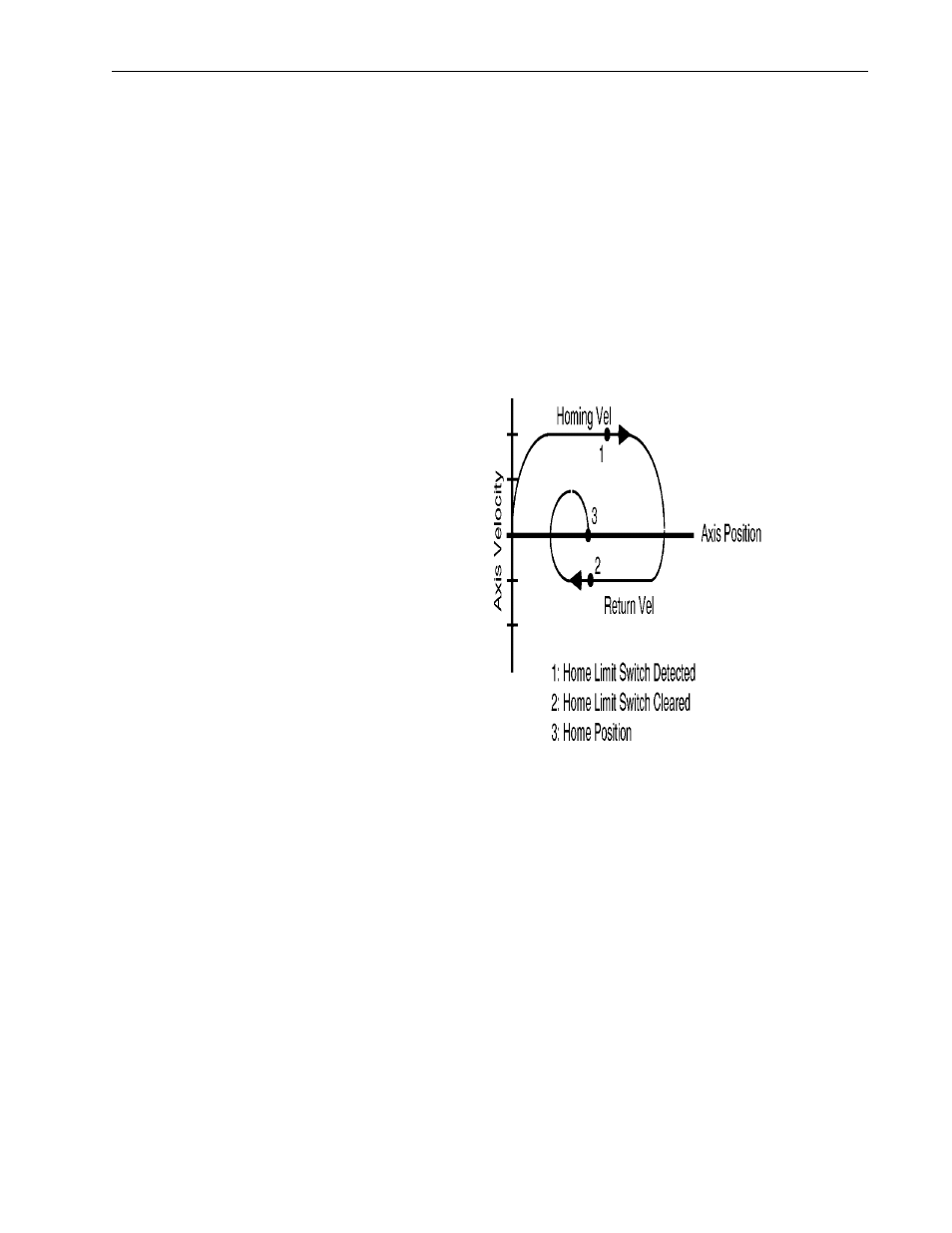
Homing to a Limit Switch
This active homing sequence is useful for multi-turn rotary and linear
applications where there are multiple encoder markers over full axis
travel or when an encoder marker is not available.
When this sequence is performed, the axis moves in the specified home
direction at the specified homing velocity until the home limit switch
is detected. The axis decelerates to a stop and then moves in the opposite
direction at the specified return velocity until the home limit switch is
cleared. The home position is assigned to the axis position at the
moment the limit switch is cleared, and the axis decelerates to a stop.
The axis then moves back to the home position at the return velocity.
The motions for this active homing sequence are shown below.
Neglecting the mechanical uncertainty of the home limit switch, the
accuracy of this homing sequence depends on the time uncertainty in
detecting the home limit switch transitions. The position uncertainty of
the home position is the product of the maximum time for the control
to detect the home limit switch (8 milliseconds) and the specified return
velocity.
For example, if a return velocity of 0.1 inches per second (6 IPM) is
specified, the uncertainty of the home position is calculated as shown
below:
0.1
Inch
Second
-------------------
0.008
×
Seconds
0.0008Inch
=