Movements through positions – IAI America PSEL User Manual
Page 360
350
Part 3 Positioner Mode
5.3 Movements
through
Positions
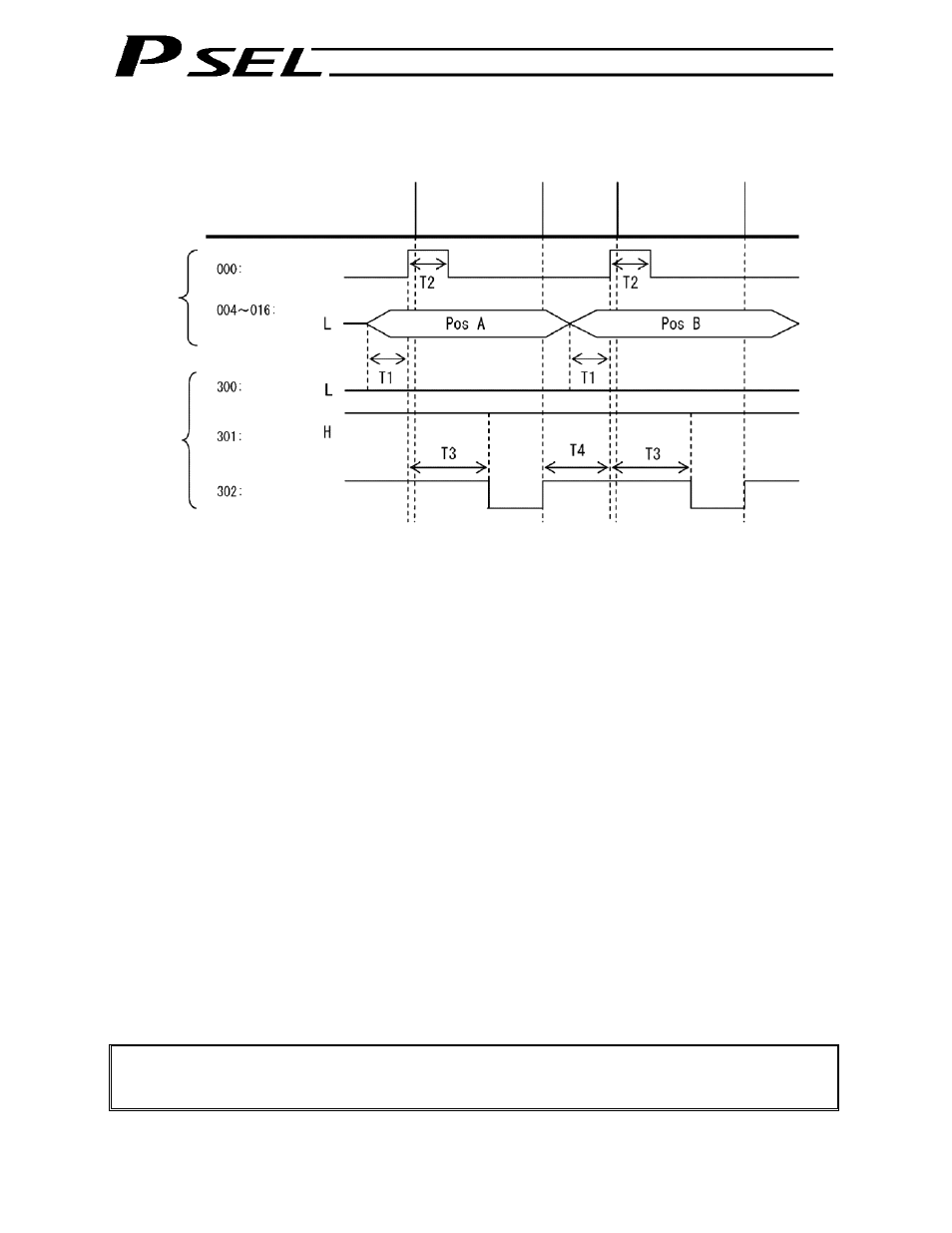
Timings of how the actuator moves through positions are illustrated below.
Operate the actuator to move through positions by following the procedure explained below.
* Confirm beforehand that the positioning complete output signal, home-return complete output signal
and servo-ON status output signal are all ON.
[1] Change the previous position number input (BCD input) to a different position number.
[2] Turn ON the start input signal. (The signal should remain ON continuously for 30 msec or more
(T2).)
[3] Turn OFF the start input signal.
[4] Wait for T3 after [2].
[5] Confirm that the positioning complete output signal is ON.
Repeat steps [1] through [5] sequentially.
* To perform interpolation operation, turn ON the interpolation setting input signal at least 30 msec before
turning ON the start input signal. Turn OFF the interpolation signal after the start input signal has turned
OFF.
* The positioning complete output signal turns ON when the actuator completes moving to the specified
position, regardless of whether the start input signal is ON or OFF.
* Take note that the time after the start signal turns ON until the positioning complete output signal turns
OFF is 60 msec or less, which is different from 15 msec or less with the DS-S-C1 controller.
Caution: Unlike in other modes, the pause input and cancellation input are contact-A input signals
(always OFF). The alarm output is also a contact-A output signal (always OFF) unlike in
other modes.
Input
Output
Positioning complete
Start
Position input
Alarm
Ready
Stopped
Stopped
Stopped
Movement
Movement
Timing Chart of Movement through Positions (Positioner Mode)
T1: Time after the position number signal is input until input of the start signal becomes
possible (30 msec or more)
T2: Start signal input (30 msec or more)
T3: Time after the start signal turns ON until the positioning complete output signal turns
OFF (60 msec or less)
T4: Time after the previous positioning complete output signal turns ON until input of the
next start signal becomes possible (50 msec or more)