Movements through positions – IAI America PSEL User Manual
Page 352
342
Part 3 Positioner Mode
000: Start
001: Servo ON
003 ~ 013: Position input
300: Alarm
301: Ready
302: Positioning complete
303: Home return complete
304: Servo ON status
[3]
[2]
[4] [7]
[9]
[10]
[8]
[5]
[6]
[1]
5.3 Movements
through
Positions
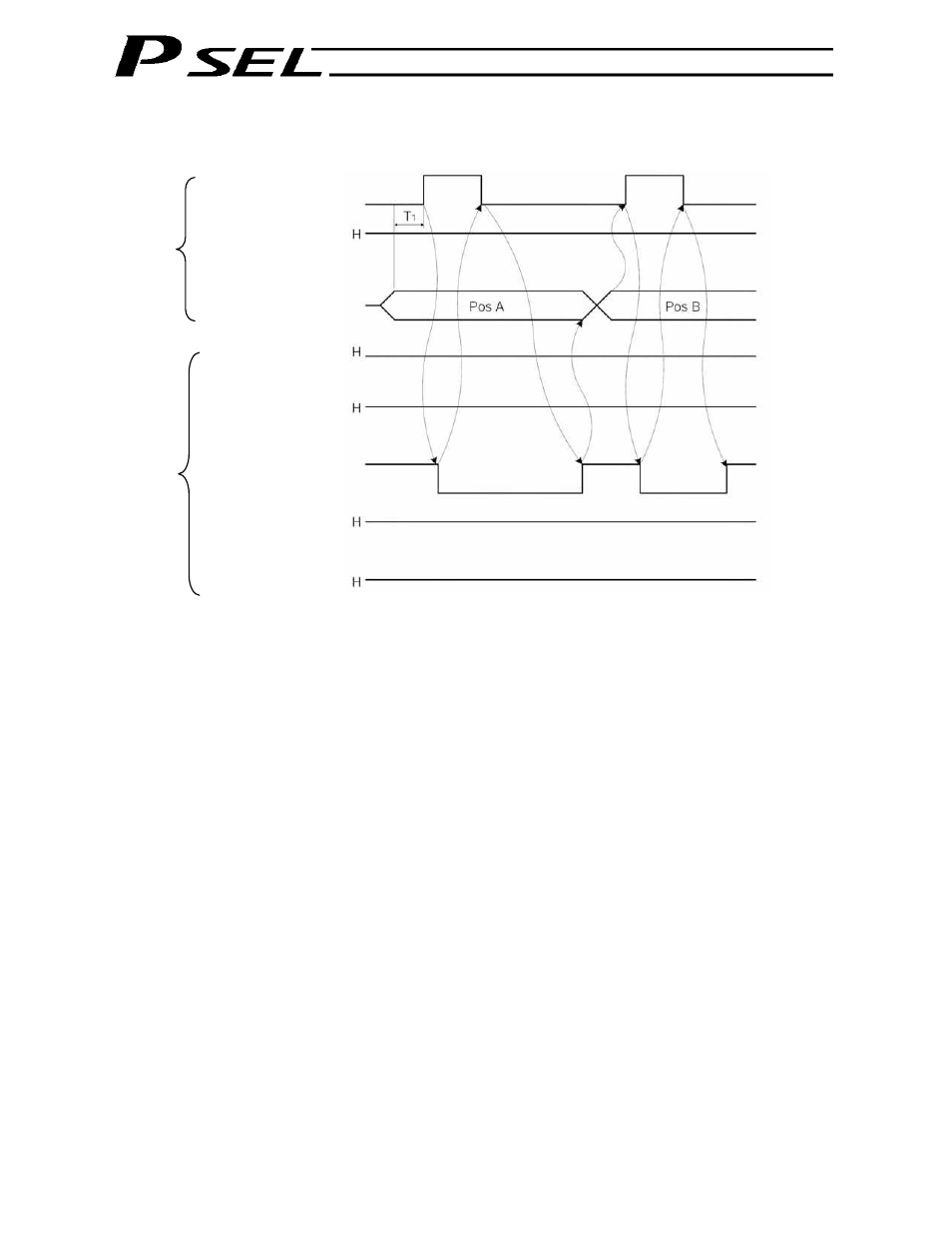
Timings of how the actuator moves through positions are illustrated below.
Timing Chart of Movement through Positions (Standard Positioner Mode)
T
1
: At least 6 msec
Operate the actuator to move through positions by following the procedure explained below.
* Confirm beforehand that the positioning complete output signal, home-return complete output signal
and servo-ON status output signal are all ON.
[1] Change the previous position number input to a different position number.
[2] Turn ON the start input signal.
[3] Confirm that the positioning complete output signal is OFF.
[4] Turn OFF the start input signal.
[5] Confirm that the positioning complete output signal is ON.
Repeat steps [1] through [5] sequentially.
* Pause input is a contact-B input signal (always ON), so keep this signal ON while home return is in
progress.
* While the actuator is moving to the target position, only the pause or cancellation input is accepted.
The servo cannot be turned off even if the servo ON input signal is turned OFF. (The servo can be
turned off only when the positioning complete output signal is ON.)
* While the start input signal is ON, the positioning complete output signal will not turn ON even after the
actuator physically completes moving to the target position. Therefore, always turn OFF the start input
signal ([4]) to detect the completion of positioning.
* As for the positioning complete output signal and push-motion complete output signal, they will not be
output until the start signal turns OFF (based on the I/O control handshake rules).
* For the actuator to operate upon start signal input, the servo ON input signal must be ON. If the servo
ON input signal is OFF, these operation commands will not be accepted. Note, however, that only the
commands will be ignored and no error will generate.
Input
Output