Rockwell Automation 1398-DDM-xxx USE MNL/ULTRA 200 DIG.SERVO.DR User Manual
Page 97
Publication 1398-5.0 – October 1998
Interfaces
6-33
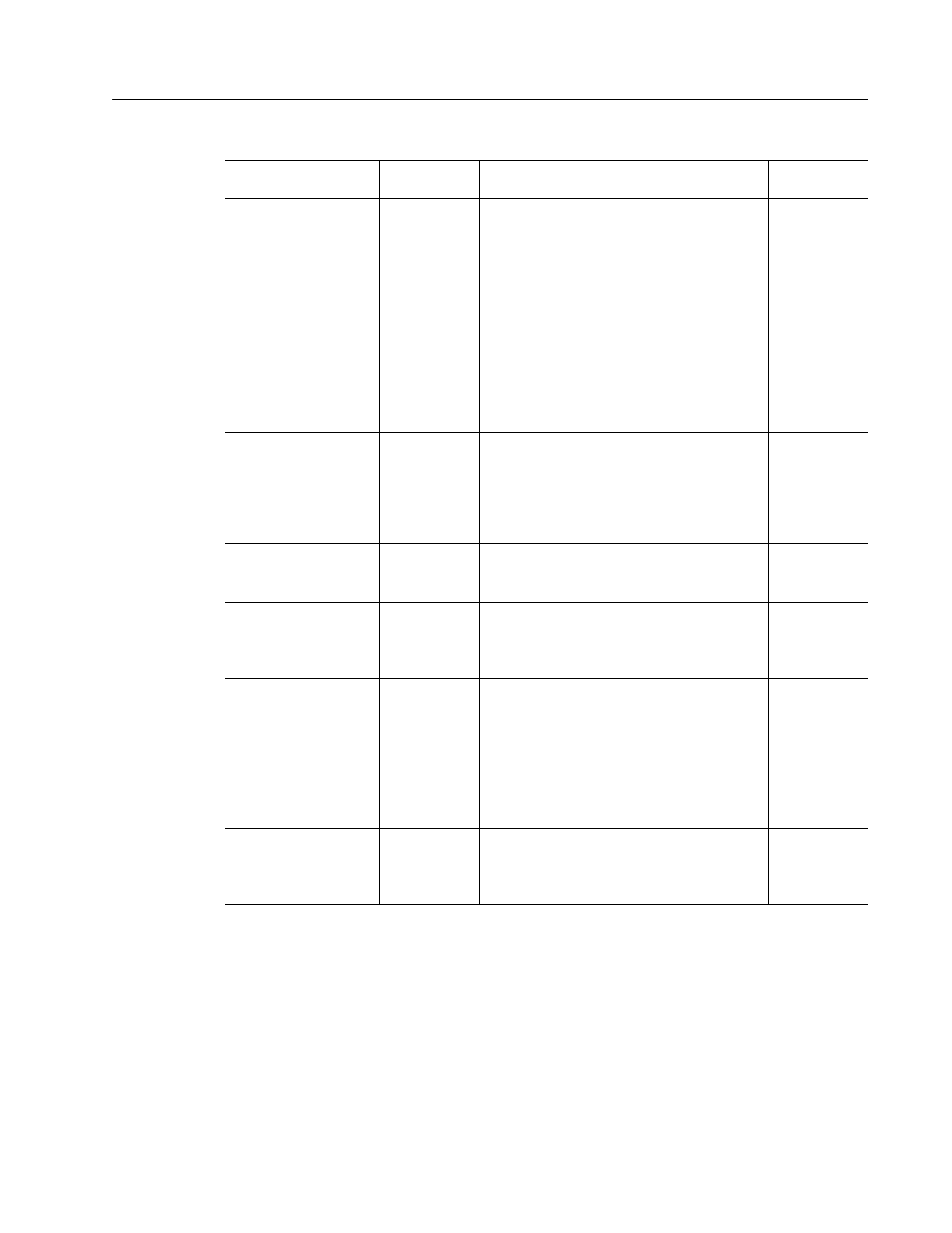
BX+ and BX-,
or
DIR+ and DIR-,
or
CCW (Step Down+)
and
CCW (Step Down-)
J3-16 (+)
J3-17 (-)
Auxiliary Channel B(+) and B(-). Differential,
quadrature, or TTL level encoder input. The
signals are selectable as BX+ and BX-, or
DIR+ and DIR-, or CCW (Step Down+). and
CCW (Step Down-).
For encoder information refer to “Quadrature
Interface Specifications” on page 6-20 and
Figure 6.23, 6.24, 6.25, 6.26, 6.27, 6.28 and
6.29.
For stepper information refer to“Step/Direc-
tion and CW/CCW (Step Up/Step Down)
Interface Specifications” on page 6-24 and
Figure 6.30, 6.31, 6.32 and 6.33.
J1-16 (+)
J1-17 (-)
IX (+)
IX (-)
J3-18 (+)
J3-19 (-)
Differential, quadrature, or TTL level encoder
input. The signals are selectable.
For encoder information refer to “Quadrature
Interface Specifications” on page 6-20 and
Figure 6.23, 6.24, 6.25, 6.26, 6.27, 6.28 and
6.29.
J1-18 (+)
J1-19 (-)
ENABLE
J3-20
Enables and disables the drive.
Refer to “Digital Input Specifications” on
page 6-6 and Figure 6.1.
J1-20
FAULT RESET
J3-21
General purpose input, selectable to one of
several drive functions.
Refer to “Digital Input Specifications” on
page 6-6 and Figure 6.1.
J1-21
COMMAND (+)
COMMAND (-)
J3-22 (+)
J3-23 (-)
Analog command signal is a differential type
signal that drives the servo controller.
Separate scale and offset parameters are
used for the input, depending on whether the
signal is a position, velocity or torque com-
mand.
Refer to “Analog Command Input” on
page 6-15 and Figure 6.18.
J1-22 (+)
J1-23 (-)
READY (+)
READY (-)
J3-24 (+)
J3-25 (-)
Contact closure indicates the drive is ready
to follow commands.
Refer to “READY Output Specifications” on
page 6-9 and Figure 6.8.
J1-24 (+)
J1-25 (-)
Table 6.23:
J3 – Auxiliary Connector Pin-Outs
(continued)
Motor Encoder
Pin Number
Description
Internal
Connections