Backlash, Velocity loop structure, Torque current conditioning structure – Rockwell Automation 1398-DDM-xxx USE MNL/ULTRA 200 DIG.SERVO.DR User Manual
Page 173: Tuning 9 - 3, Figure 9.1 velocity loop structure, Figure 9.2 torque current conditioning structure
Publication 1398-5.0 – October 1998
Tuning
9-3
Backlash
Backlash between the motor and load effectively unloads the motor
over a small angle. Within this small angle, the increased bandwidth
can result in oscillations. Some backlash may be unavoidable,
especially with gear reduction. If backlash is present, the inertia match
between the load and motor must be properly sized for good servo
performance (load inertia should roughly equal motor inertia).
Gearing reduces the inertia reflected to the motor by the square of the
gear reduction from motor to load. Therefore, the gear ratio must
provide the required match.
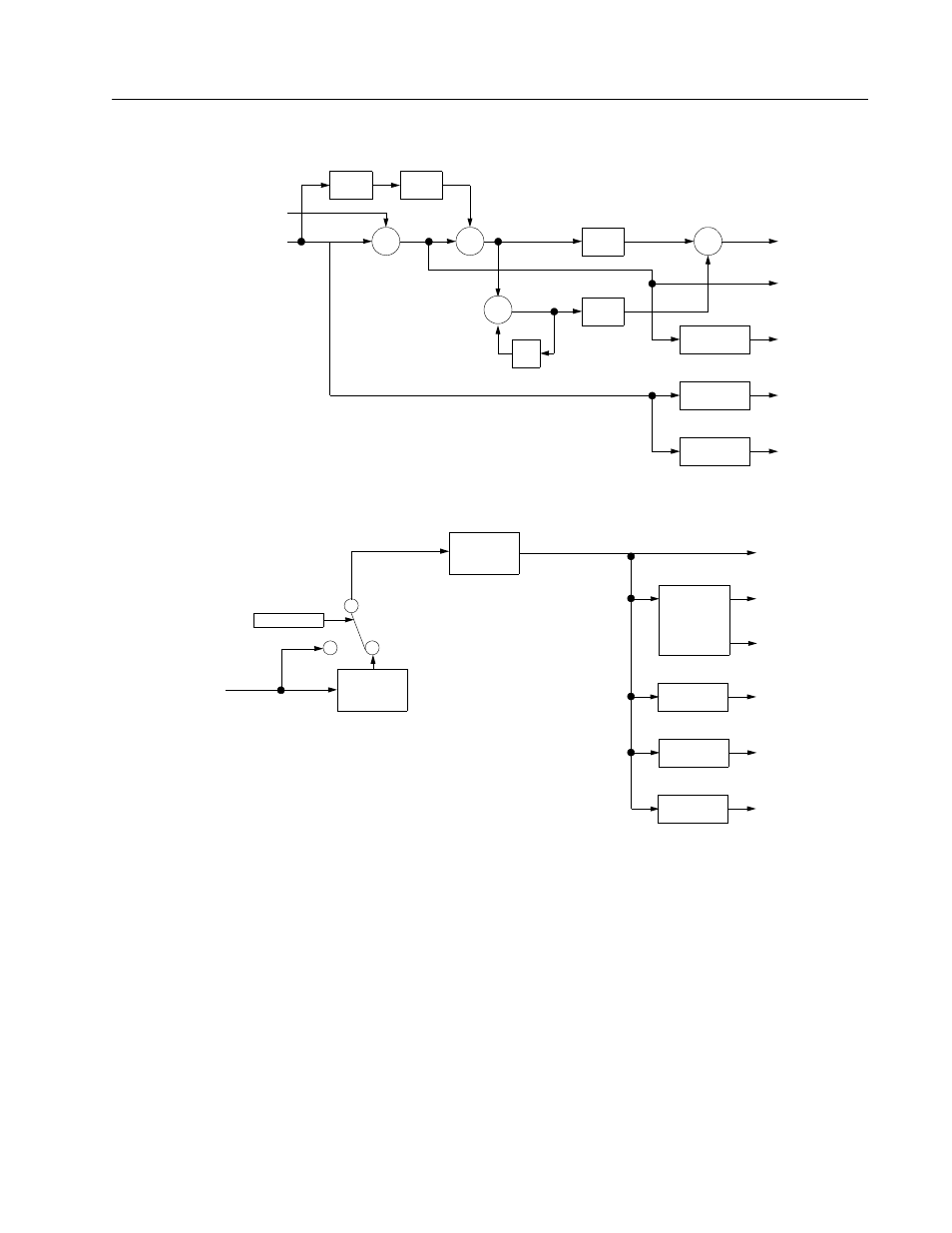
Figure 9.1
Velocity Loop Structure
Intro
Figure 9.2
Torque Current Conditioning Structure
Intro
VELOCITY
COMMAND
MOTOR
VELOCITY
VELOCITY
CONTROL
VELOCITY
ERROR
SPEED
WINDOW
OVERSPEED
ZERO SPEED
Dgain
+
1−Ζ
−1
Σ
-
+
Σ
-
+
Σ
+
Pgain
Igain
Ζ
−1
Σ
+
+
SPEED
WINDOW
OVERSPEED
ZERO SPEED
TORQUE
CURRENT
COMMAND
INPUT
TORQUE CURRENT
COMMAND OUTPUT
AVERAGE
CURRENT
CURRENT
LIMIT
PEAK DETECT
PEAK DETECT
CURRENT
LIMIT
POSITIVE
NEGATIVE
CURRENT
PEAK
CURRENT
PEAK
AVERAGE
CURRENT
CURRENT
LIMIT
LOW PASS
FILTER
LP ENABLE
EXCESSIVE
CURRENT