Motor encoder output signals, Output encoder interface circuit, Analog output specifications – Rockwell Automation 1398-DDM-xxx USE MNL/ULTRA 200 DIG.SERVO.DR User Manual
Page 81: Vm linecount ⋅ 60 n
Publication 1398-5.0 – October 1998
Interfaces
6-17
Motor Encoder Output Signals
The motor quadrature encoder signals are supplied to an external
position controller. The signals are differential, quadrature, and TTL
level. The output resolution is selectable and can be divided by 1, 2, 4
or 8.
The signal frequency (fout) of the motor encoder output in Hertz (Hz)
can be calculated with the equation:
If the device connected to the motor encoder output counts all edges,
the count frequency is four times f
out
.
Table 6.16:
Analog Output Specifications
Specification
Description
Minimum
Maximum
ANALOG 1
Output Resolution
(Bits)
Number of units that the ANALOG1 output
voltage is converted into.
12
ANALOG 2
Output Resolution
(Bits)
Number of units that the ANALOG2 output
voltage is converted into.
8
Output Current
(mA)
Allowable current draw of the load
-2
+2
Output Signal Range
(Volts)
Voltage range of the signal
-10
+10
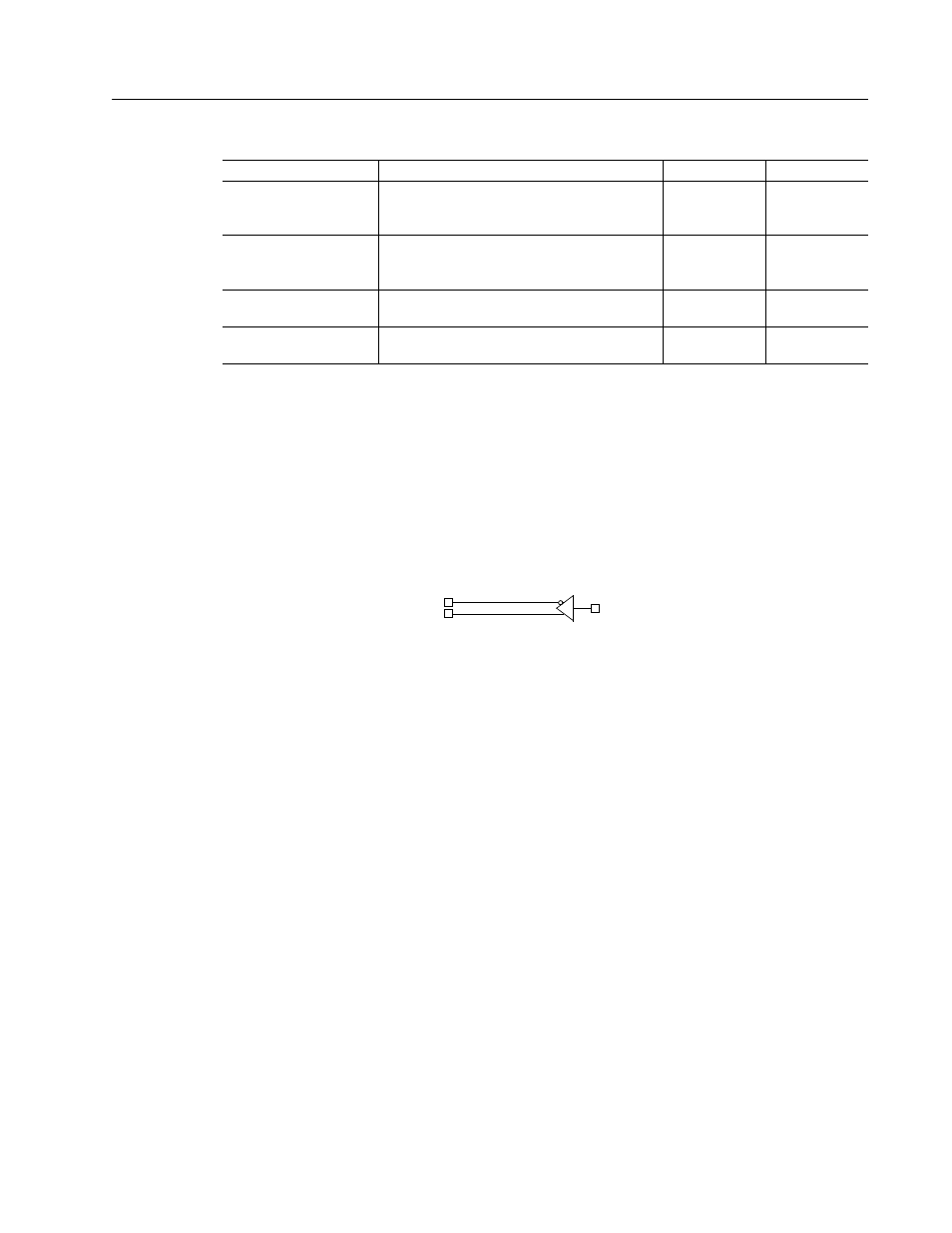
Figure 6.20
Output Encoder Interface Circuit
Intro
AMOUT-
AMOUT+
AMOUT
AM26C31 or AM26LS31
Drive
J1
where:
Vm is the motor encoder velocity
in rpm
linecount is the number of
encoder lines/revolution of the
motor mounted encoder, and
N is
the output divider from the soft-
ware selected parameter (1, 2, 4
or 8).
f
out
Vm linecount
⋅
60 N
⋅
---------------------------------------
=