Rockwell Automation 1398-DDM-xxx USE MNL/ULTRA 200 DIG.SERVO.DR User Manual
Page 197
Publication 1398-5.0 – October 1998
Maintenance and Troubleshooting
11-9
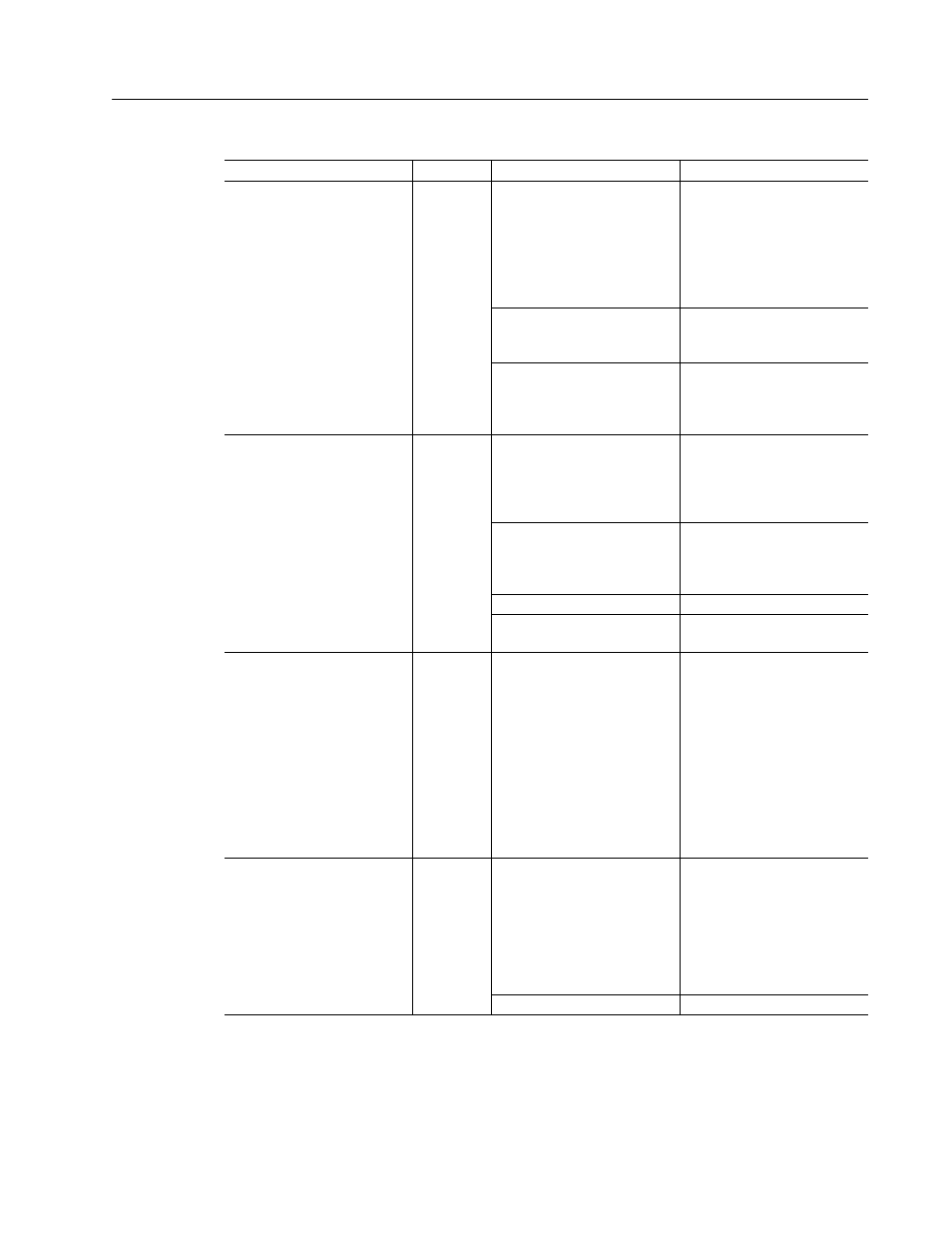
Excessive Average Current
17
Excessive time at peak cur-
rent
Reduce acceleration rates
Reduce duty cycle (ON/
OFF) of commanded
motion.
Increase time permitted for
motion.
User larger drive and motor.
Software parameter set too
low
Increase Average Current
parameter to a less restric-
tive setting.
Insufficient bus voltage
Correct the under voltage
condition or intermittent AC
power or install a larger size
transformer.
Motor Overspeed
18
OVERSPEED parameter in
the drive set to low for the
application
Using ULTRA Master (refer
to Drive Parameters section)
set Overspeed parameter to
an acceptable range for the
application.
Motor commanded to run
above Overspeed setting
Reduce command from
position controller or change
velocity parameter in the
position controller.
Motor Phasing is incorrect
Check motor phasing.
Motor encoder phasing is
incorrect
Check encoder phasing.
Excess Following Error
19
Software position error limit
was exceeded
Increase the feed forward
gain to 100%.
Increase the following error
window (refer to
ULTRA Master Drive Param-
eters section).
Retune the drive to reduce
the following error.
Increase the slew limit win-
dow (refer to ULTRA Master
Drive Parameters).
Motor Encoder State Error
20
Motor encoder encountered
an illegal transition
Replace the motor/encoder
Use shielded cables with
twisted pair wires.
Route the feedback away
from potential noise
sources.
Check the system grounds.
Bad encoder
Replace motor/encoder.
Table 11.1:
Troubleshooting Guide
(continued)
Problem or Symptom
Error Code
Possible Cause(s)
Action/Solution