General and dedicated inputs, Input1, input2, input3, input4, And fault reset functions – Rockwell Automation 1398-DDM-xxx USE MNL/ULTRA 200 DIG.SERVO.DR User Manual
Page 69
Publication 1398-5.0 – October 1998
Interfaces
6-5
Refer to the I/O Configuration section of the ULTRA Master manual
for information on choosing the input type for each channel.
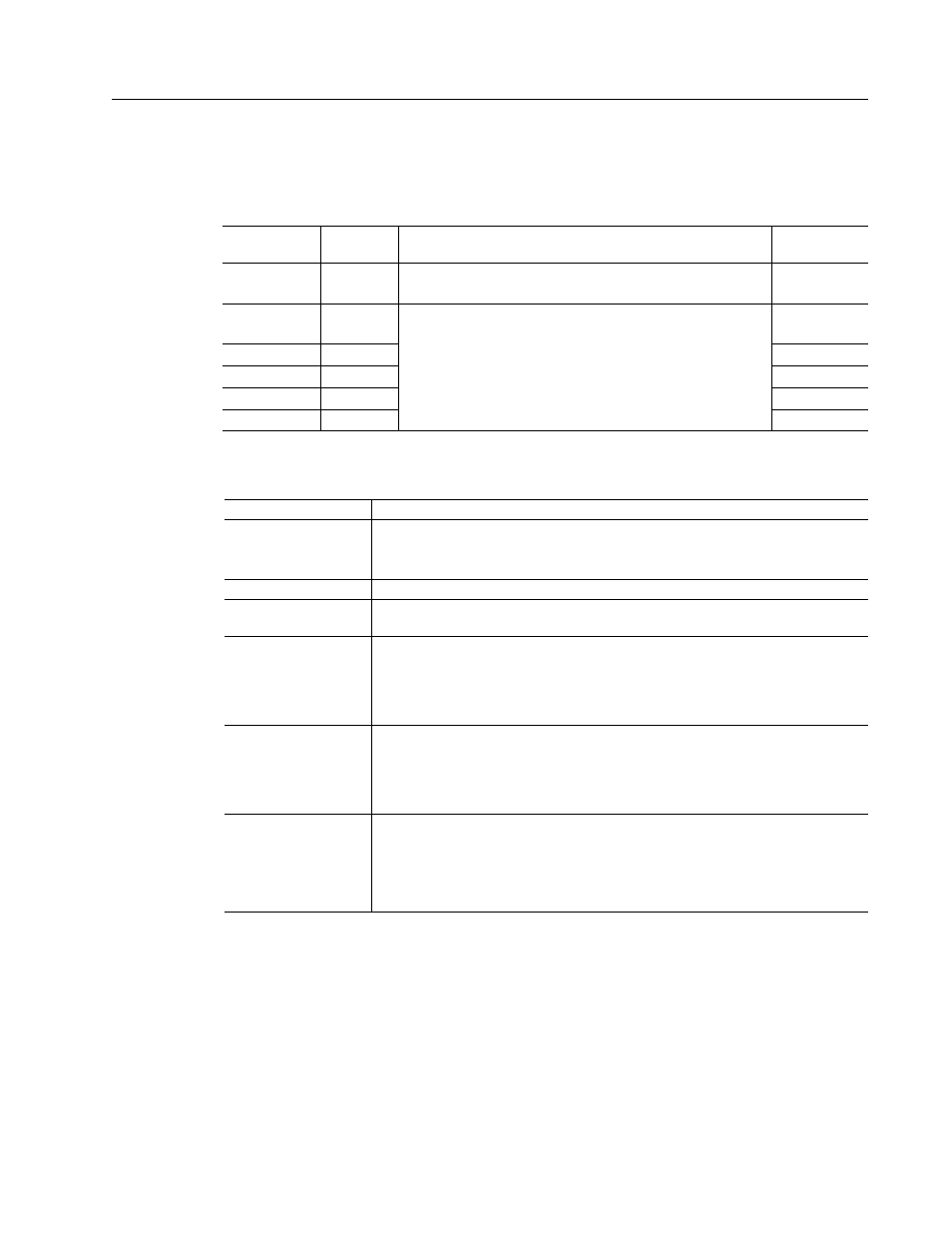
Table 6.3:
General and Dedicated Inputs
Digital Input
Pin
Number
Function/Description
Internal
Connections
ENABLE
J1-20
Enables and disables the drive. Motor torque cannot be
applied unless the ENABLE input is active.
J3-20
FAULT
RESET
J1-21
General purpose input selectable to one of several drive
functions. Refer to Table 6.4 for I/O configuration.
J3-21
INPUT 1
J1-32
INPUT 2
J1-33
INPUT 3
J1-34
INPUT 4
J1-35
Table 6.4:
INPUT1, INPUT2, INPUT3, INPUT4
and FAULT RESET Functions
Function
Description
Drive Mode Select
Active
1
state configures the drive for Torque Mode.
Inactive
2
state selects the personality EEPROM setting as the command
source.
Integrator Inhibit
Active
1
state zeros the Velocity Loop Error Integrator.
Follower Enable
Active
1
state allows the position loop to track the AUXILIARY POSITION
LOOP signal when in the Follower mode.
Forward Enable
Active
1
state allows forward commands in velocity mode only. If this input is
inactive or not connected, no velocity command will be allowed in the forward
direction. If motion is in progress when the input is pulled low or disconnected,
the drive halts immediately without deceleration control. The COMMAND sig-
nal is clamped internally to 0 Volts.
Reverse Enable
Active
1
state allows reverse commands in velocity mode only. If this input is
inactive or not connected, no velocity command will be allowed in the reverse
direction. If motion is in progress when the input is pulled low or disconnected,
the drive halts immediately without deceleration control. The COMMAND sig-
nal is clamped internally to 0 Volts.
Operation Mode
Override
Active
1
state selects the Operation Mode Override setting as the command
source.
Inactive
2
state selects the Operation Mode setting as the command source.
Table 6.4 on page 6-5 lists the valid Operation Mode and Operation Mode
Override combinations.