Rockwell Automation 20D PowerFlex 700S Drive Ph I Control, Frames 1...11 User Manual
Page 80
3-26
Programming and Parameters
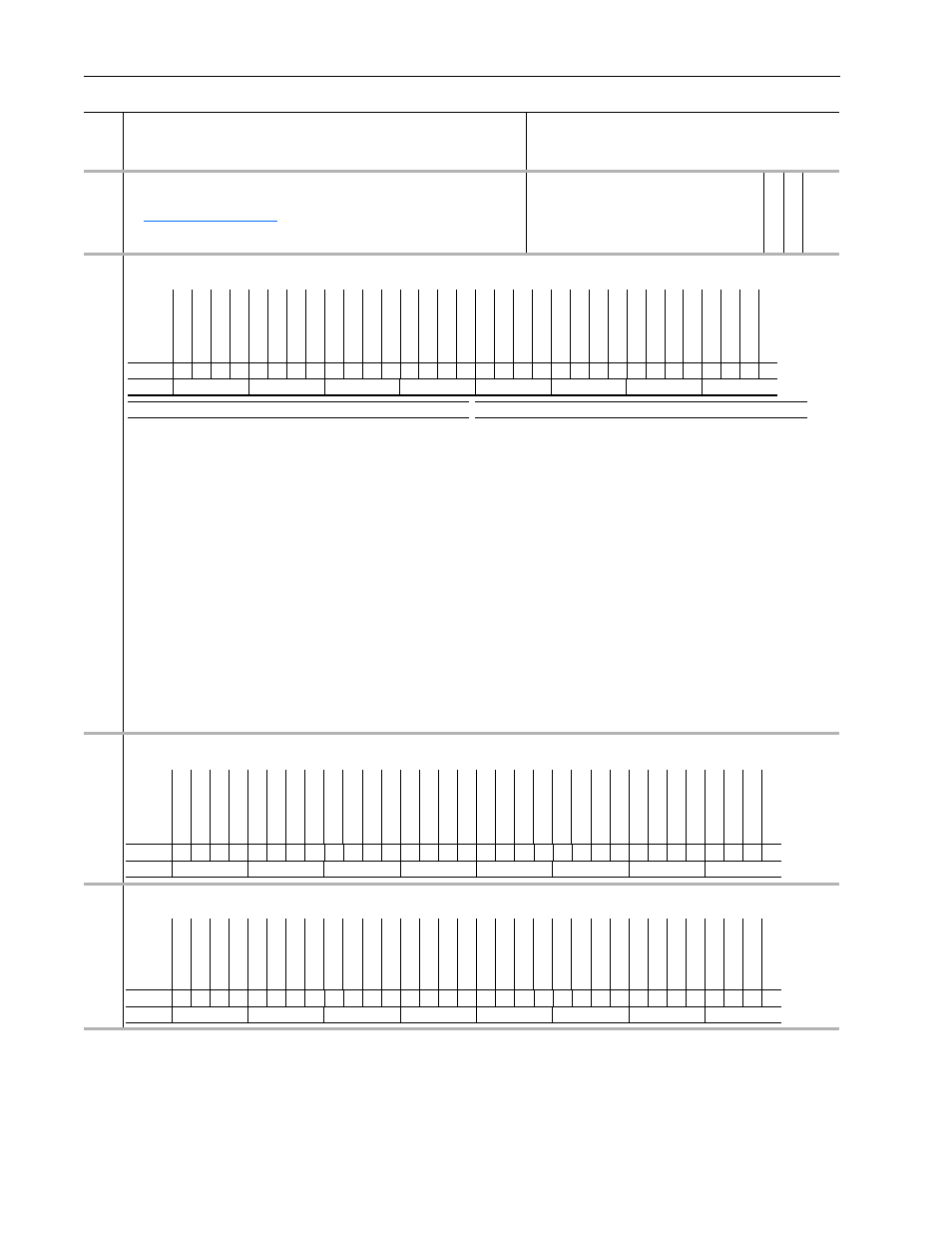
154
Stop Dwell Time
Sets an adjustable delay time between detecting zero speed and disabling the speed and
torque regulators, when responding to a stop command. For more information, please
see
.
Important:
Consult industry and local codes when setting the value of this
parameter.
Units:
Default:
Min/Max:
Sec
0.0000
0.0000/10.0000l
✓ ✓ Real
155
Logic Status
Displays the status - condition of the drive.
156
Run Inhibit Stat
Indicates which condition is preventing the drive from starting or running.
157
Logic Ctrl State
Indicates which logic control functions are enabled.
No.
Name
Description
Values
Li
nkab
le
Read
-Wr
it
e
Da
ta
T
ype
Options
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Comma
nd Run
Star
t A
ctiv
e
P
osition
Mode
Spe
ed Mode
Tor
que
Mo
de
Res
er
ved
Spd
Co
mm
is
MC Commis
MC En Ac
k
Abo
ve Setpt2
At
Se
tp
t 1
Res
er
ved
At Se
tp
t Spd
At
Z
ero
Sp
d
Ta
ch
L
os
s
Sw
At L
imit
Run
Re
ady
Flas
h Mo
de
Alar
m
Faulte
d
Jo
gging
Dec
elera
ting
Acc
eler
ating
Actua
l Dir
Comma
nd Dir
Run
ning
Ena
bled
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
Bit Name
Current Function
Bit
Name
Current Function
0
Enabled
Drive is controlling motor
14
At Setpt Spd Speed feedback is within limits defined in Par 41
[Limited Spd Ref] and 171 [Set Speed Lim]
1
Running
Run command received & controlling motor
15
Reserved
2
Command
Dir
Commanded direction is forward
16
At Setpt 1
Par 172 [Setpt 1 Data] value is within limits defined
by Par 173 [Setpt1 TripPoint] and 174 [Setpt 1 Limit]
3
Actual Dir
Actual motor direction is forward
17
Above Setpt
2
Par 175 [Setpt 2 Data] value is within limits defined
by Par 176 [Setpt2 TripPoint] and 177 [Setpt 2 Limit]
4
Accelerating Motor is increasing speed
18
MC En Ack
Drive is controlling motor (same as enabled)
5
Decelerating Motor is decreasing speed
19
MC Commis Motor control commissioning in progress
6
Jogging
Jog command received & controlling motor
20
Spd Commis Speed control commissioning in progress
7
Faulted
Exception event that causes a fault has occurred
21
Reserved
8
Alarm
Exception event that causes an alarm has occurred
22
Torque Mode Par 110 [Spd/Torq ModeSel] value is 2, 3, 4, 5 or 6
9
Flash Mode Flash upgrade in progress
23
Speed Mode Par 110 [Spd/Torq ModeSel] value is 1 & position
control is not enabled
10
Run Ready Enable input is high & drive is fault free
24
Position
Mode
Position control active & Par 110 [Spd/Torq
ModeSel] value is not 2, 3, 4, 5 or 6
11
At Limit
Speed, Power, Current or Torque is being limited, refer to
Par 304
25
Start Active
Start command received & controlling motor
12
Tach Loss
SW
Failure is detected in primary speed or position feedback
device & drive has switched to secondary device
26
Command
Run
Run command received
13
At Zero Spd Speed feedback is within limits defined in Par 160
27-31
Reserved
0 = False
1 = True
Options
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
Reser
ved
PM Mt
r
Fd
bk
Motin Shtdo
wn
Dig
In Con
fig
Bus PreChrg
Encod
er PPR
Jog
Sta
rt
Flash Upg
rd
Po
w
er
E
E
Po
w
er
L
os
s
SW I L
im
Stp
SW Coa
st Stp
SW Ramp
Stop
No Enab
le
Fa
ul
te
d
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
Procs
Tr
im En
Cmd Dir
Upo
l
Lg
x I/
O
Cn
x
Lg
x Run Mode
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
PM Of
fs
et
Rq
Mt
r Di
r Req
Pwr Dia
g
R
eq
MC At
une Req
FT
D Ra
mp E
n
MC En Req
R
T
hr
u Flux
DC Br
ak
e En
Mtr Sim
Mo
de
R
T
hr
u Coas
t
CurrRef En
F
orc
ed Spd
To
rq
Re
f En
Spd
Re
g E
n
SRe
g IntgHld
CurrLim Stop
J Ts
t FulSpd
Iner
t Tst
E
n
Po
si
tio
nE
nb
l
SRe
f SCr
v
En
SRe
f Ramp En
Spd
Re
f En
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True