Rockwell Automation 20D PowerFlex 700S Drive Ph I Control, Frames 1...11 User Manual
Page 56
3-2
Programming and Parameters
➊
➋
➌
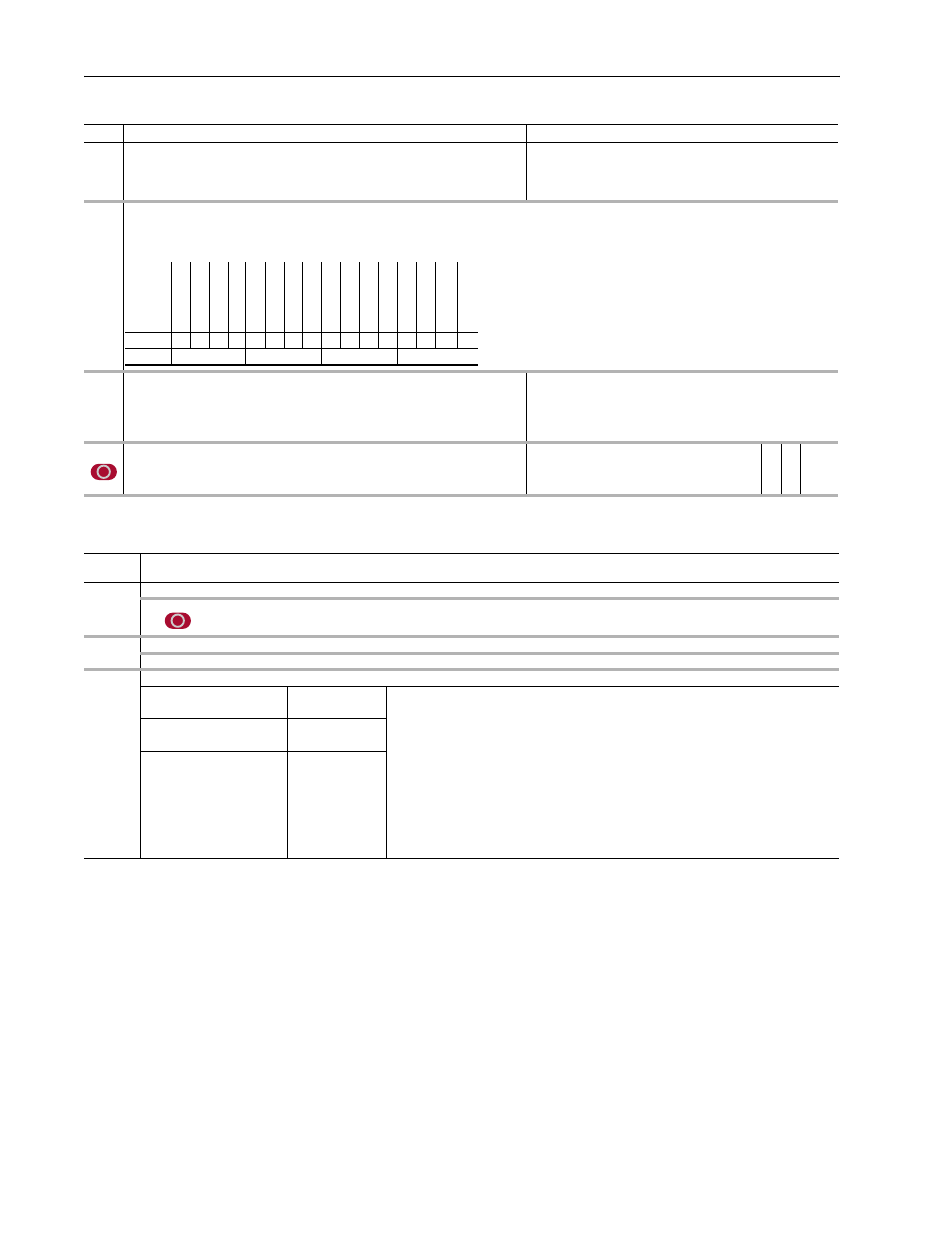
No.
Name
Description
Values
Li
nkab
le
Read
-Wr
it
e
Da
ta
T
ype
151
Logic Command
The controller-drive interface (as defined by the Controller Communication Format) sets bits to enable and disable various functions and algorithms. Bits that
are changed here are reflected in Parameter 152 [Applied LogicCmd]. Note: Bits 4 through 9 in Logic Command are NOT recalled from Control EEprom. They
will be cleared upon drive power up or following an EEprom recall operation.
110
Spd/Torq ModeSel
Selects the source for the drive torque reference.
Default:
Options:
1
0
1
2
3
“Speed Reg”
“Zero Torque”
4
“Max Spd/Torq”
“Speed Reg”
5
“Sum Spd/Torq”
“Torque Ref”
6
“AbsMn Spd/Tq”
“Min Spd/Torq”
4
Motor NP RPM
Set to the motor nameplate rated RPM.
Units:
Default:
Min/Max:
Comm Scale:
RPM
Calculated
1/30000
Parameter 4 [Motor NP RPM] = 1.0
✓ 16-bit
Integer
Options
Rese
rv
ed
Rese
rv
ed
P
os
itionEn
bl
Pro
csT
ri
m En
Fr
ic
t C
om
p
In
er
tia
Co
mp
Sys
Iner
t En
Mtr
Ine
rt En
PM Offs
et
En
Dir Sel En
Pwr Diag
En
MC A
tun
e E
n
Time Axis En
Tach
Los
s Rst
Spd S Cr
v En
SpdRa
m
p D
sb
l
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = True
1 = False
No.
Name
Description
➊
No. - Parameter Number
Parameter value cannot be changed until the drive is stopped.
➋
Name - Parameter name as it appears in DriveExecutive software.
Description - Brief description of parameter function.
➌
Values - Define the various operating characteristics of the parameter. There are 3 types of Values.
ENUM
Default:
Lists the value assigned at the factory.
Options:
Displays the selections available.
Bit
Default:
Lists the value assigned at the factory.
Options:
Displays the selections available.
Numeric
Default
Lists the value assigned at the factory.
Min.
Displays lowest possible setting.
Max.
Displays highest possible setting.
Type
Indicates if parameter is linkable, read-write, read-only, and data type (i.e. integer, floating point,
boolean).
Comm
Scale:
Value sent from Controller or Comm Device = Drive Parameter Value x Comm Scale