Rockwell Automation 20D PowerFlex 700S Drive Ph I Control, Frames 1...11 User Manual
Page 132
3-78
Programming and Parameters
844
DigOut 1 Bit
Selects the bit, from the word linked to Par 843 [DigOut 1 Data], that will change the
status of Digital Output 1 (e.g., when Par 844 [DigOut 1 Bit] equals 0, bit 0 of Par 843
[DigOut 1 Data] will control Digital Output 1).
Default:
Min/Max:
0
-32/31
✓ ✓ 16-bit
Integer
845
DigOut 2 Data
Link a word to this parameter that will control Digital Output 2. The bit within the selected
word that will control Digital Output 2 is set by Par 846 [DigOut 2 Bit].
Default:
Min:
Max:
00000000000000000000000000000000
00000000000000000000000000000000
11111111111111111111111111111111
✓ ✓ 32-bit
Boolean
846
DigOut 2 Bit
Selects the bit, from the word linked to Par 845 [DigOut 2 Data], that will change the
status of Digital Output 2 (e.g., when Par 846 [DigOut 2 Bit] equals 0, bit 0 of Par 845
[DigOut 2 Data] will control Digital Output 2).
Default:
Min/Max:
0
-32/31
✓ ✓ 16-bit
Integer
850
ParamAccessLevel
The value of this parameter establishes the level of parameter access for the Human
Interface Module (HIM).
• 0 “Basic” - grants access to the minimum number of parameters
• 1 “Advance” - grants access to a larger group of parameters
• 2 “Engineering” - grants access to all the parameters
Default:
Options:
0
0
1
2
“Basic”
“Basic”
“Advanced”
“Engineering”
901
MotnUpdatePeriod
Servo update period for the Servo axis (drive).
Units:
Default:
Min/Max:
uSec
2000
1/999999
DWord
902
Motion CoarseMulti
Number of Par 901 [MotnUpdatePeriod] comprising one Course Update Period from the
Motion Period.
Default:
Min/Max:
4
2/16
DWord
903
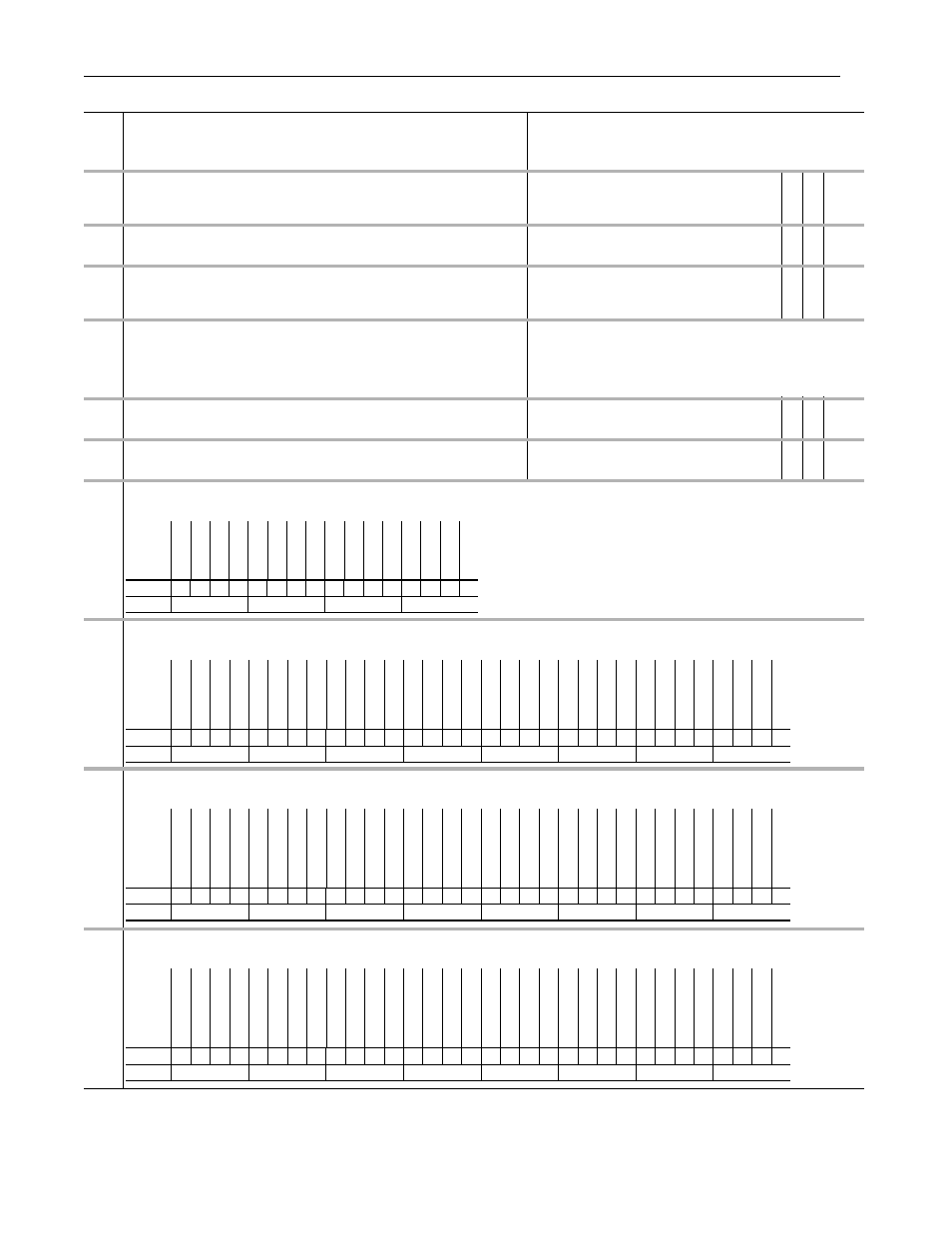
Motn Config
Configuration bits pertaining to Motion-related functions for the Servo axis.
904
Motn Axis Status
Status bits pertaining to Motion-related functions for the Servo axis.
905
Motn AxisControl
Command request bits from the Motion Planner to both the Servo and Feedback Only axis.
906
Motn Axis Resp
Command response from both the Servo and Feedback Only axis to the Motion Planner.
No.
Name
Description
Values
Li
nkab
le
Read
-Wr
it
e
Da
ta
T
ype
Options
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Hrd Ov
r
Tr
vl
Sft Ovr
Tr
vl
P
ola
ri
ty
Ne
g
Default
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
AxisS
htd
wnC1
Res
er
ved
Res
er
ved
Chng
Re
f
Res
er
ved
Res
er
ved
Cour
se
Up
dt
CST Upd
t Err
-H
rd Ovr
Tr
vl
+Hrd
Ov
rT
rv
l
-S
ft Ov
rT
rv
l
+Sft
Ov
rT
rv
l
Res
er
ved
Res
er
ved
Res
er
ved
P
osit Loc
k
AxisS
hut
do
wn
Dr
v En
ab
le
Mo
tn
Ac
tion
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
ChngCmd
Ref
C1
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Abr
t Ev
nt C1
Abr
t Ho
me
C1
Rese
rv
ed
Shut
do
wn C1
Rese
rv
ed
ChngCmd
Ref
C0
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Abr
t Ev
nt C0
Abr
t Ho
me
C0
Rese
rv
ed
Shut
do
wn C0
Rese
rv
ed
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
Chng
CmdRef
C1
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Abr
t Evnt C1
Abr
t Home C1
Res
er
ved
Shut
do
wn C1
Res
er
ved
Chng
XRe
f C0
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Abr
t Evnt C0
Abr
t Home C0
Res
er
ved
Shut
do
wn C0
Res
er
ved
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True