Rockwell Automation 20D PowerFlex 700S Drive Ph I Control, Frames 1...11 User Manual
Page 112
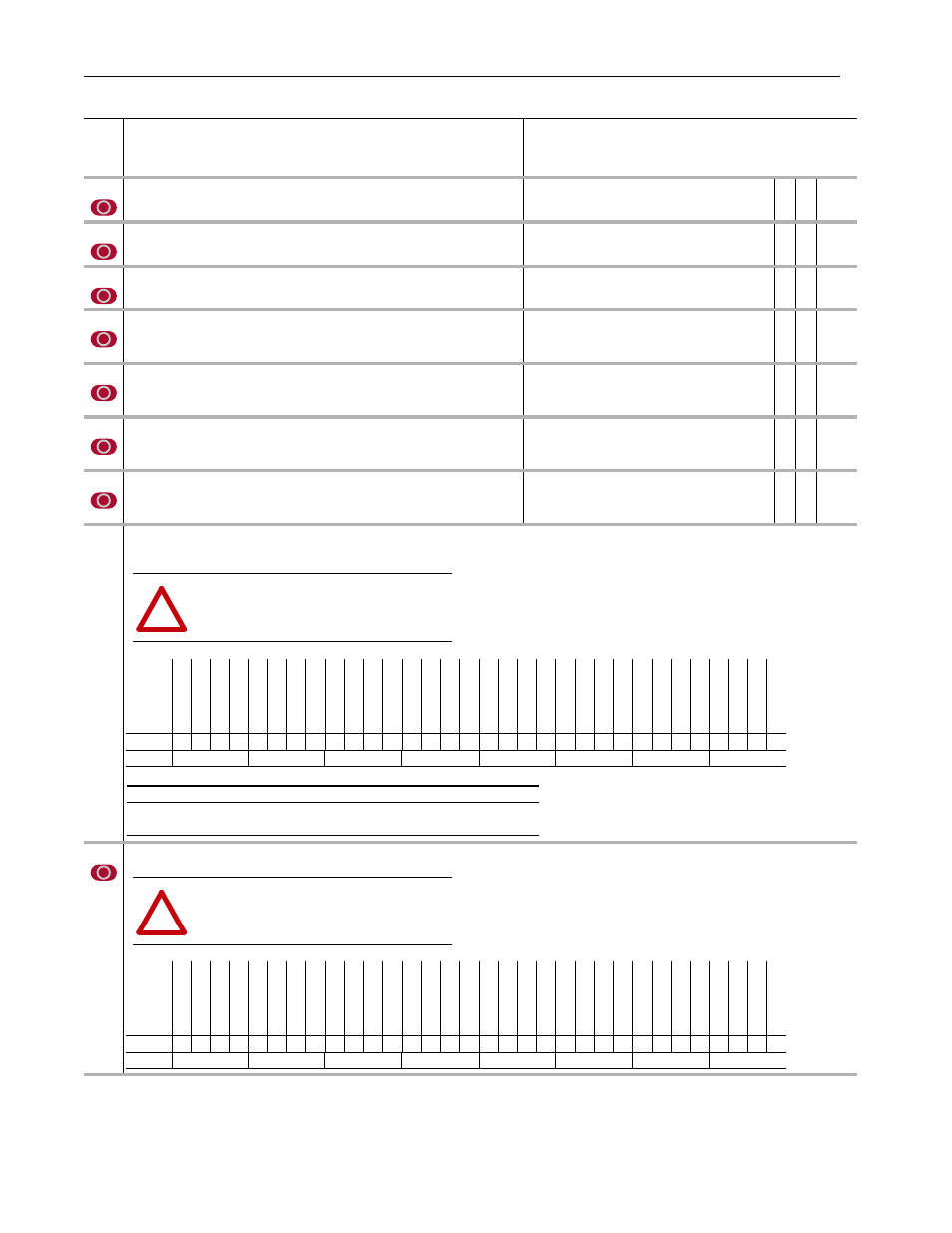
3-58
Programming and Parameters
No.
Name
Description
Values
Li
nk
ab
le
R
ead-
Wri
te
D
ata
T
ype
503
Current Reg BW
Sets the bandwidth for the current regulator. Par 402 [PWM Frequency] limits the
maximum value. Reducing the value reduces current regulator over-shoot.
Units:
Default:
Min/Max:
R/S
600
100/30000
✓ 16-bit
Integer
504
PM AbsEncd Offst
Determined by the autotune procedure.
Default:
Min/Max:
0
0/65535
✓ 16-bit
Integer
505
PM TestWait Time
Defines the time interval used for the automated measurement of Par 504 [PM AbsEncd
Offst] for a Permanent Magnet (PM) motor.
Units:
Default:
Min/Max:
mSec
2000
500/5000
✓ 16-bit
Integer
506
PM Test Idc Ramp
Defines the ramp rate of the flux producing (d-axis) current reference that is used for the
automated measurement of Par 504 [PM AbsEncd Offst] for a Permanent Magnet (PM)
motor.
Units:
Default:
Min/Max:
Comm Scale:
%/mS
0.1
0.0/195.3
x 10
✓ 16-bit
Integer
507
PM Test FreqRamp
Defines the ramp rate of the frequency reference that is used for the automated
measurement of Par 504 [PM AbsEncd Offst] for a Permanent Magnet (PM) motor.
Units:
Default:
Min/Max:
Comm Scale:
%/mS
0.1
0.0/195.3
x 10
✓ 16-bit
Integer
508
PM Test Freq Ref
Defines the frequency reference that is used for the automated measurement of Par 504
[PM AbsEncd Offst] for a Permanent Magnet (PM) motor.
Units:
Default:
Min/Max:
Comm Scale:
%
10.0
-/+799.9
x 10
✓ 16-bit
Integer
509
PM Test I Ref
Defines the amplitude of the flux producing (d-axis) current reference that is used for the
automated measurement of Par 504 [PM AbsEncd Offst] for a Permanent Magnet (PM)
motor.
Units:
Default:
Min/Max:
Comm Scale:
%
30.0
0.0/799.9
x 10
✓ 16-bit
Integer
510
FOC Mode Config
Configures Field Oriented Control (FOC) operation.
Note: Bit 15 [LwSpdRflctWv] was added for firmware version 2.06
511
FOC2 Mode Config
Configures Field Oriented Control - 2 (FOC2) operation.
!
ATTENTION: Do not modify this parameter.
Motor/Drive instabilities and damage could
result.
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
F
S
P
res
et
Spd
Re
se
rv
ed
Re
se
rv
ed
S
rLs
sFStr
tEn
S
rLs
s RdTh
ru
S
rLs
sW
eL
imit
Sr
Lss
W
eH
old
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
LwSpdRf
lct
Wv
S
lip Reg En
Sl
ip
G
ai
n E
st
R
sEst
Updat
e
R
sEst Ratio
R
sEst
Adapt
Re
flW
av
eC
om
p
B
usGain Comp
LwSpd Vqs
R
eg
Fl
ux
R
eg
U
se
Fl
ux
R
eg
E
n
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
1
1
0
1
1
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Bit
Definition
23
Enables Sensorless Flying start
26
Sensorless Flying start function will use the speed set in Par 451 [SrLss Preset Spd].
!
ATTENTION: Do not modify this parameter.
Motor/Drive instabilities and damage could
result.
Options
Linr
Snsr
Dir
LnrSns
r Use
Res
er
ved
FlxRa
tRf Use
NTC Activ
e
Res
er
ved
Res
er
ved
CEMF W
e Use
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
ReflW
av
eCo
mp
Bus
G
ain C
omp
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
1
10 0
1
1
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True