Rockwell Automation 20D PowerFlex 700S Drive Ph I Control, Frames 1...11 User Manual
Page 77
Programming and Parameters
3-23
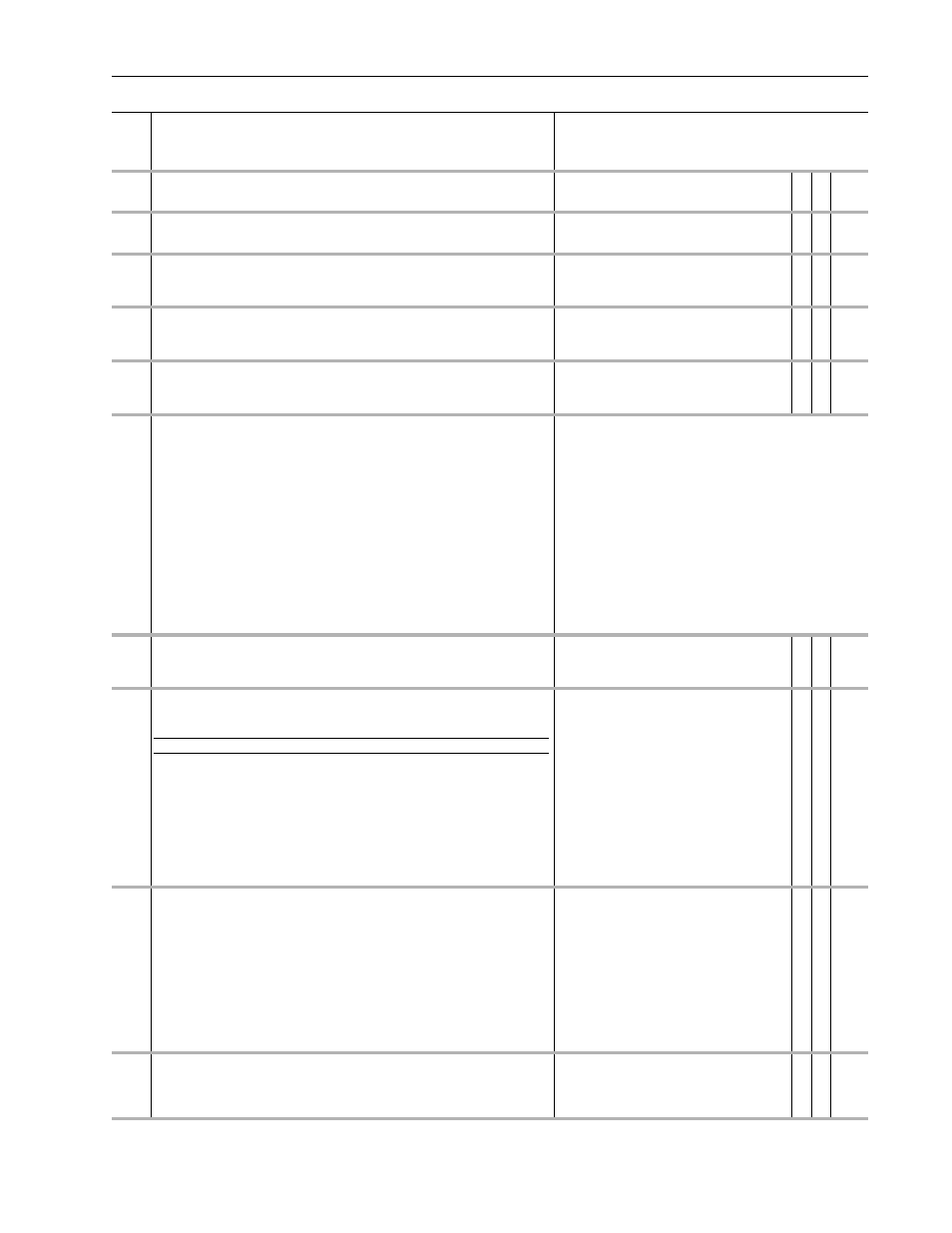
125
Torque Pos Limit
Sets the external torque limit for positive torque reference values. The external positive
motor torque will not be allowed to exceed this value.
Units:
Default:
Min/Max:
P.U.
2.0000
0.0000/8.0000
✓ ✓ Real
126
Torque Neg Limit
Sets the external torque limit for negative torque reference values. The external negative
motor torque will not be allowed to exceed this value.
Units:
Default:
Min/Max:
P.U.
-2.0000
-8.0000/0.0000
✓ ✓ Real
127
Mtring Power Lim
Sets the maximum motoring (positive) power of the drive. This can be calculated by
multiplying the desired maximum motor torque and the maximum motor speed. A value of
1.0 = nominal motor power.
Units:
Default:
Min/Max:
P.U.
8.0000
0.0000/8.0000
✓ ✓ Real
128
Regen Power Lim
Sets the maximum regenerative (negative) power of the drive. This can be calculated by
multiplying the desired maximum motor torque and the maximum motor speed. A value of
1.0 = nominal motor power.
Units:
Default:
Min/Max:
P.U.
-1.0000
-8.0000/0.0000
✓ ✓ Real
129
Atune Torq Ref
Sets the motor torque that is applied to the motor during the flux current and inertia tests.
Units:
Default:
Min/Max:
Comm Scale:
P.U.
0.5000
0.2500/1.0000
1.0 = P.U. Motor to Torque
✓ ✓ Real
130
Torq Ref TP Sel
Enter or write a value to select torque reference data displayed in Par 131 [Torq Ref TP
Data].
Default:
Options:
0
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
“Zero”
“Zero”
16 “Neg Lim Src”
“Scale Output”
17 “MPwr Par Lim”
“Spd Torque”
18 “RPwr Par Lim”
“TrqModeOut”
19 “+Torq ParLim”
“Actv rqMode”
20 “-Torq ParLim”
“Actv Mod Out”
21 “Nom Bus Volt”
“Torq En In”
22 “Bus Volt Hys”
“NotchFiltOut”
23 “Bus Reg Ref”
“NotchFilt In”
24 “Bus Reg Err”
“Torq Lim In”
25 “Bus Reg Intg”
“Bus Reg Out”
26 “BusReg Clamp”
“Pos Pwr Lim”
27 “BusRegOutput”
“Neg Pwr Lim”
28 “IAA Filt Out”
“PosAtun Torq”
29 “IAA dVf/dt”
“NegAtun Torq”
30 “MC Torq Lim”
“Pos Lim Src”
31 “Int Torq Lim”
131
Torq Ref TP Data
Displays the data selected by Par 130 [Torq Ref TP Sel].
Units:
Default:
Min/Max:
Comm Scale:
P.U.
0.0000
-/+8.0000
1.0 = P.U. Motor to Torque
Real
132
Inert Adapt Sel
Configures the Inertia Adaptation Algorithm (IAA Function). Contains the following
selections:
Default:
Min/Max:
00000000
00000000/00000011
✓ Real
133
Inert Adapt BW
This parameter sets the bandwidth of the Inertia Adaptation function when the IAA
function is selected (Par 132 [Inert Adpt Sel], bit 0 [Inrtia Adapt]). Typical IAA bandwidths
range from 70 to 150 rad/sec with 100 rad/sec nominal best.
If the Load Estimate (Par 132 [Inert Adpt Sel], bit 1 [load Est]) function is selected, then
this parameter sets the natural frequency of a filter in rad/sec. Typical values range from
10 to 150 rad/sec with higher values being more responsive to disturbances but with
increased system noise. There is no nominal best value, but 40 rad/sec is a suggested
starting point. This adjustment may not function well in 'sloppy' geared systems.
If both Inertia Adaptation and Load Estimate functions are active, use a bandwidth setting
of 100 rad/sec.
Units:
Default:
Min/Max:
R/S
100.0000
10.0000/250.0000
✓ Real
134
Inert Adapt Gain
This parameter sets a multiplier of system inertia when the Inertia Adaptation function is
selected (Par 132 [Inert Adpt Sel], bit 0 [Inrtia Adapt]). Higher values may cause high
frequency ringing, while smaller values may cause fundamental load instability. A typical
value is 0.5 This parameter has no affect on the Load Estimate function.
Default:
Min/Max:
0.500
0.300/1.000
✓ Real
No.
Name
Description
Values
Li
nkab
le
Read
-Wr
it
e
Da
ta
T
ype
Bit
Name
Current Function
0
Inrtia Adapt
When set to 1 (on), the IAA function will effect enhanced
stability, higher bandwidths and dynamic stiffness. Useful when
systems with a gear-box becomes disconnected from the load.
Also used with motors that have very little inertia that otherwise
lack dynamic stiffness, even at high bandwidths.
1
Load Est
When set to 1 (on), the Load Estimate option removes or greatly
reduces load disturbances and gives quicker system response.
0 & 1
This mode enhances stability as well as removing load
disturbances.