Rockwell Automation 1441-PEN25-Z Enpac 2500 Data Collector User Manual
Page 46
46
Rockwell Automation Publication GMSI10-UM002D-EN-E - August 2012
Chapter 1
The Enpac 2500 Data Collector
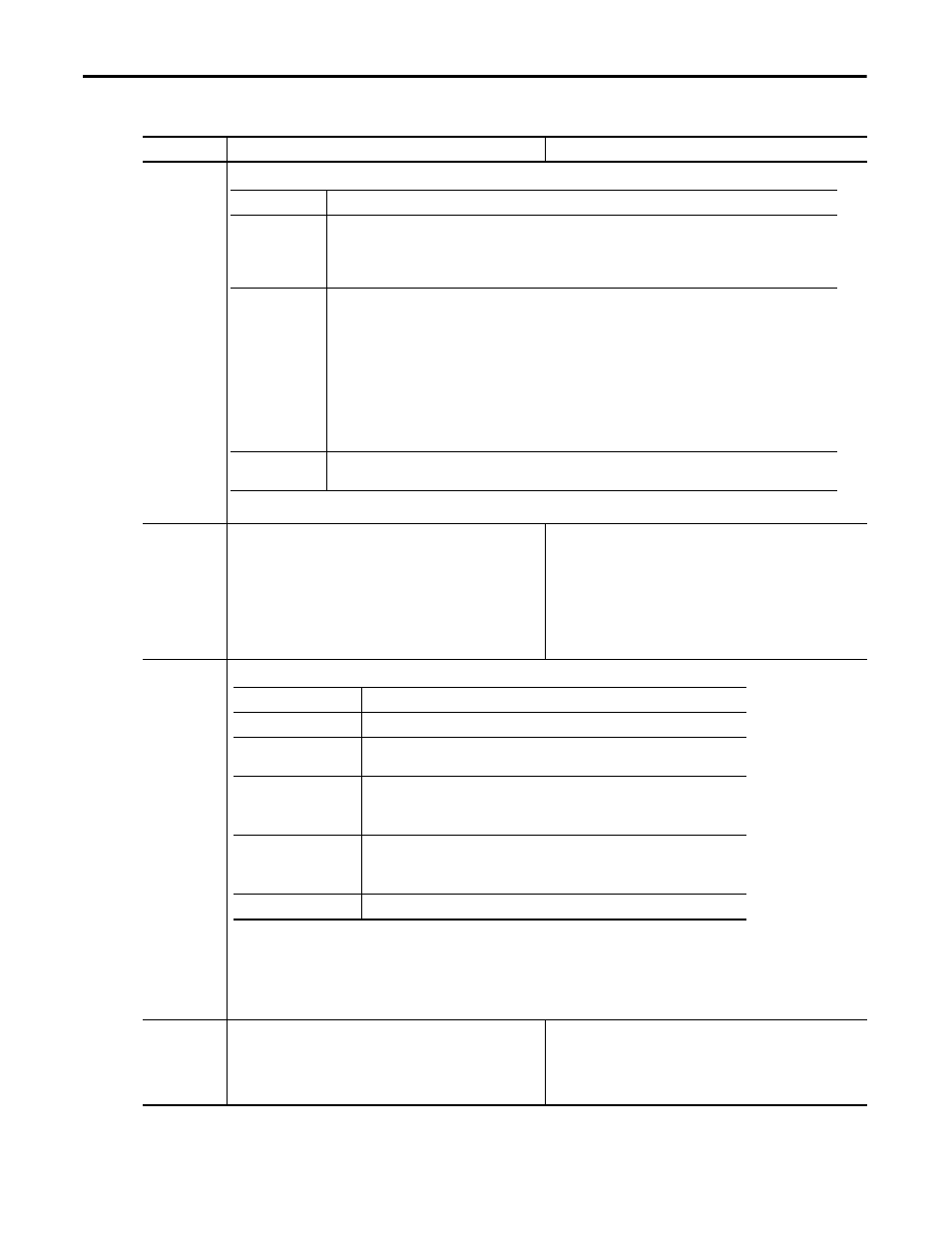
Mach. Speed
Controls the amount of time auto-ranging will wait to be sure it has seen the peak signal value of the sample.
When faster data collection is desired, set Autoranging to `Aggressive and Mach. Speed to `Normal.
Settling Delay
The amount of time the instrument should delay data acquisition after
applying power to an ICP accelerometer.
The specified delay applies only to the first ICP measurement after
turning ICP on, for example, the first measurement at the start of a
ROUTE or a measurement following a non-ICP measurement
After the first measurement, data acquisition times are not affected. If
ski slope anomalies occur, try increasing the settling delay by one or two
seconds.
0.00…60.00 s
5.00 s (default)
Memory
Configures the data collectors memory.
Multi Meas View
Determines what is viewed on the screen while taking multiple
measurement location.
First (default)
Last
All
None
Table 8 - Instrument Configuration Parameters
Parameter
Description
Value
Value
Description
Normal
Sets the auto-ranging algorithm to only track signals above 120 rpm. Therefore, use this setting when the machine
speed is greater than 120 rpm.
The normal speed setting guarantees the waiting time be no longer than 0.5 seconds. It will significantly improve
auto-ranging times and therefore data collection times for any points that have low filters (<2 Hz) selected.
Slow
Sets the auto-ranging algorithm down to the Low Pass Filter setting. (If none, it will track down to approximately
0.33 Hz or 20 CPM.) Therefore, use this setting when the machine speed is less than 120 rpm.
The slow speed setting enables low frequency auto-ranging to accommodate collection of low frequency
components. For slow speed equipment, this is necessary to be sure adequate sampling and collection of the peak
signal. The slow speed setting allows the Enpac 2500 to auto-range on machines running as slow as 20 rpm. The
auto-ranging algorithm makes an assumption about the speed of the machine that is being monitored to determine
how long to wait for the peak signal value to be seen. With the slow speed setting, the wait-time is calculated as 1 /
f
hpf
where f
hpf
is the high-pass filter cutoff in Hz for the current point.
For example, if a 0.36 Hz filter is selected, the auto-ranging algorithm will wait for 1 / 0.36 = 2.78 seconds to make
sure it has seen the peak signal value.
Auto (default)
Select to have the Enpac 2500 automatically select Normal or Slow depending on the measurements speed setting
specified by Emonitor.
Value
Description
Select cmd: Default
Exit this parameter without selecting an option.
Purge
Marks all the points on the route as taken, sets the current reading to be the previous
reading for each point, and deletes all the Offroute data.
Delete route
Deletes the current route in memory.
If you have an internal or SD storage card, the route to be deleted depends on what you
have chosen on the Setup Utility screen.
Delete all routes
Deletes all routes and data in memory.
If you have an internal or SD storage card, the route to be deleted depends on what you
have chosen on the Setup Utility screen.
Initialize
Formats the active memory. Note this will delete all routes and data in active memory.
TIP
Configure only when you open data collection. You must have a Route open for
the memory option to display. A Route must be in active memory.