Visual kv series, Chapter 5 positioning control – KEYENCE Visual KV Series User Manual
Page 288
5.3 Examples of Using the Positioning Control Function
Visual KV
Series
5
Chapter 5 Positioning Control
3-264
2008
EI
0001
0002
0003
0004
0005
0006
0007
0008
0009
0010
0011
0012
0013
0014
0015
0016
1100
DIFU
1101
DIFU
#00000
DW
#00001
DW
#00100
DW
#04000
DW
#00600
DM1484
DM1485
DM1482
DM1481
DM1480
DW
1200
RES
0503
RES
0008
0009
0008
2309
0006
1103
DIFU
1105
DIFU
0503
SET
0009
1100
0008
0009
2309
0004
1101
2002
HSP
0000
HSP
0002
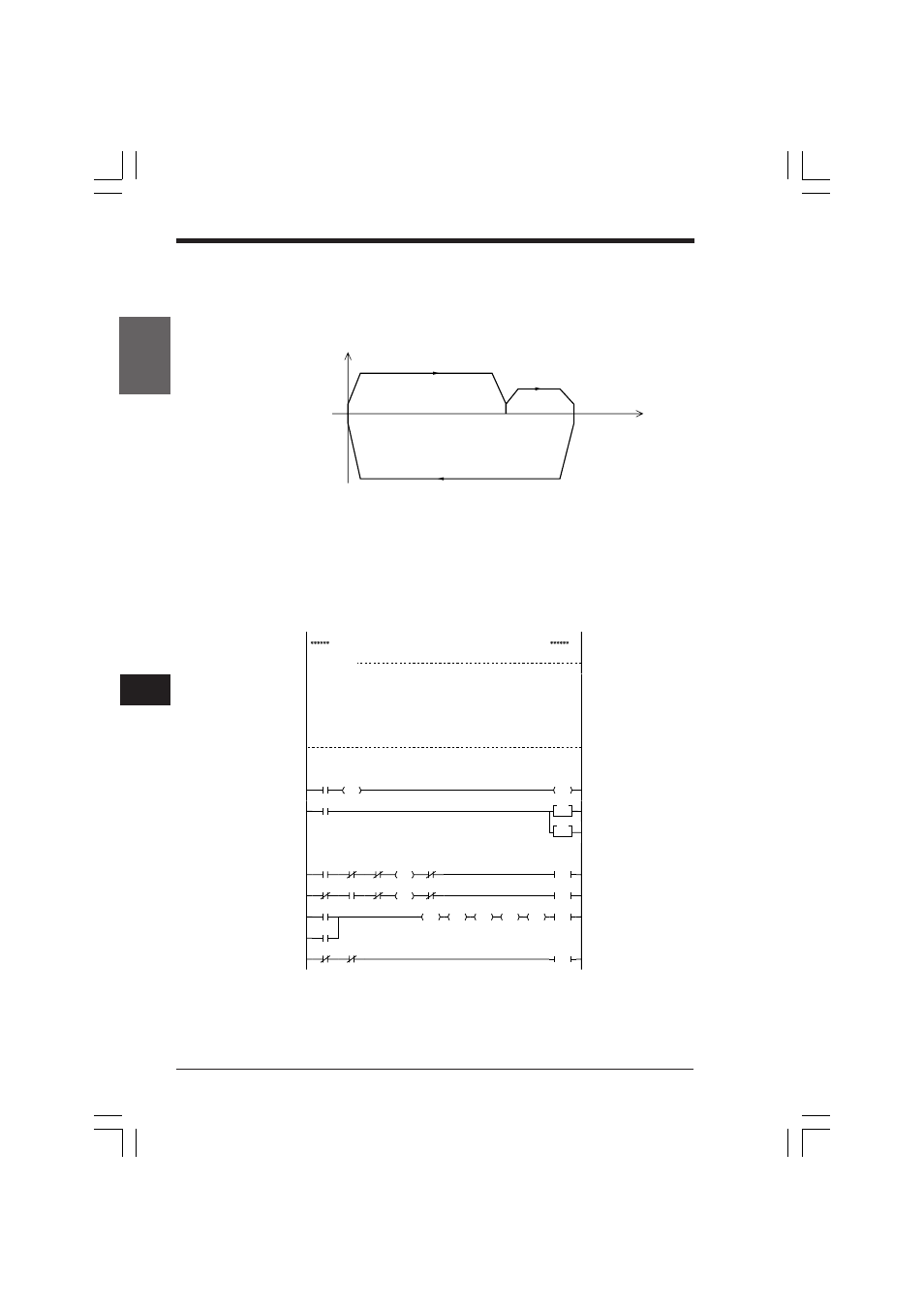
Ladder example of a pulse motor application circuit
This is a program example which offers control using both automatic and manual
operations.
In automatic operation, when input 000 is set to ON, the following operation is
performed.
In manual operation, the machine moves forward while input 0008 is ON, and moves
backward while input 0009 is ON. When input 0007 is set to ON, the machine
returns to the zero point.
Output 0502 outputs pulses. The rotation direction is changed by an ON/OFF of
0503.
This machine is equipped with a zero-point sensor (0002), a forward limit switch
(0006), and a backward limit switch (0004).
■ Program example
0
15000
17500
300
15000
2000
8000
Speed (Hz)
Coordinate
(pulses)
Pulse motor application circuit (with zero point sensor, forward
limit switch, and backward limit switch)
Set the startup frequency,
operating frequency, and
acceleration/deceleration
time for manual operation.
• Startup frequency: 600 Hz
• Operating frequency: 4 kHz
• Acceleration/
deceleration: 100 ms
• Number of output pulses:
65,536
Specifications
Pulse output: 0502
Rotation direction: 0503
Forward limit switch: 0006
Backward limit switch: 0004
Manual switch: Forward = 0008, backward = 0009
Zero point switch:
0007
Automatic operation start: 0000
Resets interrupt permission & zero point detection flag.
Manual switch (0008: Forward, 0009: Backward)
KVNKA Chap 05.p65
08.3.11, 0:09 PM
264