4 servo gain adjustment functions, 1 feed-forward reference, 2 torque feed-forward – Yaskawa Sigma II Series SGMVH User Manual
Page 267: 1 feed-forward reference 9.4.2 torque feed-forward, Pn002 n, Pn400
9.4 Servo Gain Adjustment Functions
9
Adjustments
9-7
9.4 Servo Gain Adjustment Functions
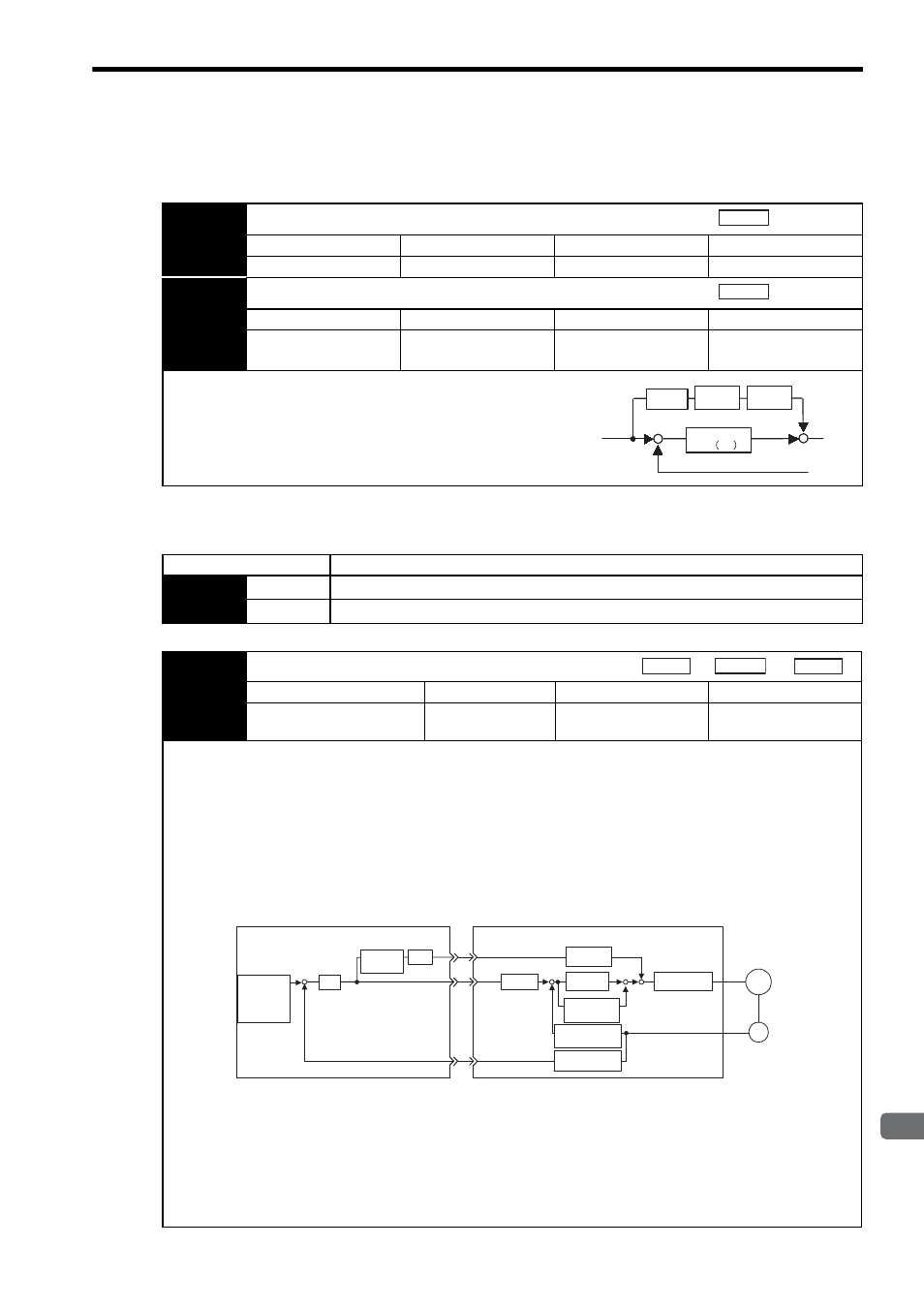
9.4.1 Feed-forward Reference
9.4.2 Torque Feed-forward
Pn109
Feed-forward
Setting Range
Setting Unit
Factory Setting
Setting Validation
0 to 100
1 %
0
Immediately
Pn10A
Feed-forward Filter Time Constant
Setting Range
Setting Unit
Factory Setting
Setting Validation
0 to 6,400
(0.00 to 64.00 ms)
0.01ms
0
Immediately
Applies feed-forward compensation in position control inside
the
SERVOPACK
. Use this parameter to shorten positioning
time. Too high value may cause the machine to vibrate. For
ordinary machines, set 80% or less in this parameter.
Position
Position
Position
reference pulse
Encoder feedback pulse
+
+ +
-
Position loop
gain Kp
Pn109
Pn10A
Differ-
ential
Parameter
Meaning
Pn002
n.
0
Disabled
n.
2
Uses T-REF terminal for torque feed-forward input.
Pn400
Torque Reference Input Gain
Setting Range
Setting Unit
Factory Setting
Setting Validation
10 to 100
(1.0 to 10.0 V/rated torque)
0.1 V/rated torque
30
Immediately
The torque feed-forward function is valid only in speed control (analog reference).
The torque feed-forward function shortens positioning time, differentiates a speed reference at the host controller to gener-
ate a torque feed-forward reference, and inputs the torque feed-forward reference together with the speed reference to the
SERVOPACK.
Too high a torque feed-forward value will result in overshooting or undershooting. To prevent such troubles, set the opti-
mum value while observing the system responsiveness.
Connect a speed reference signal line to V-REF (CN1-5 and -6) and a torque forward-feed reference to T-REF (CN1-9 and
-10) from the host controller.
Torque feed-forward is set using the parameter Pn400.
The factory setting is Pn400 = 30. If, for example, the torque feed-forward value is
±
3V, then, the torque is limited to
±
100% of the rated torque.
The torque feed-forward function cannot be used with torque limiting by analog voltage reference described in 8.9.3
Torque Limiting Using an Analog Voltage Reference.
Speed
Position
Torque
-
V-REF (CN1-5)
Position
reference
Kp
Pn100
Current loop
M
PG
Differ-
ential
K
FF
Speed
calculation
Integration
(Pn101)
+
+
+
+
+
T-REF (CN1-9)
Servomotor
Encoder
Host controller
SERVOPACK
Kp: Position loop gain
K
FF
: Feed-forward gain
+
+
Pn400
Pn300
-
Divider