1 autotuning, 1 servo gain adjustment methods, 2 list of servo adjustment functions – Yaskawa Sigma II Series SGMVH User Manual
Page 262: 1) online autotuning functions, 2) positioning time reduction functions
9 Adjustments
9.1.1 Servo Gain Adjustment Methods
9-2
9.1 Autotuning
9.1.1 Servo Gain Adjustment Methods
The SERVOPACK has the servo gains to determine the servo response characteristics. The servo gains are set in
the parameters. The parameters are designated for each function as shown in 9.1.2 List of Servo Adjustment
Functions.
The servo gains are factory-set to stable values, and responsiveness can be increased depending on the actual
machine conditions. Select the adjustment method according to the client’s intent using 9.1.2 List of Servo
Adjustment Functions.
9.1.2 List of Servo Adjustment Functions
(1) Online Autotuning Functions
Online autotuning functions cannot be used for SERVOPACKs of 22 kW or more.
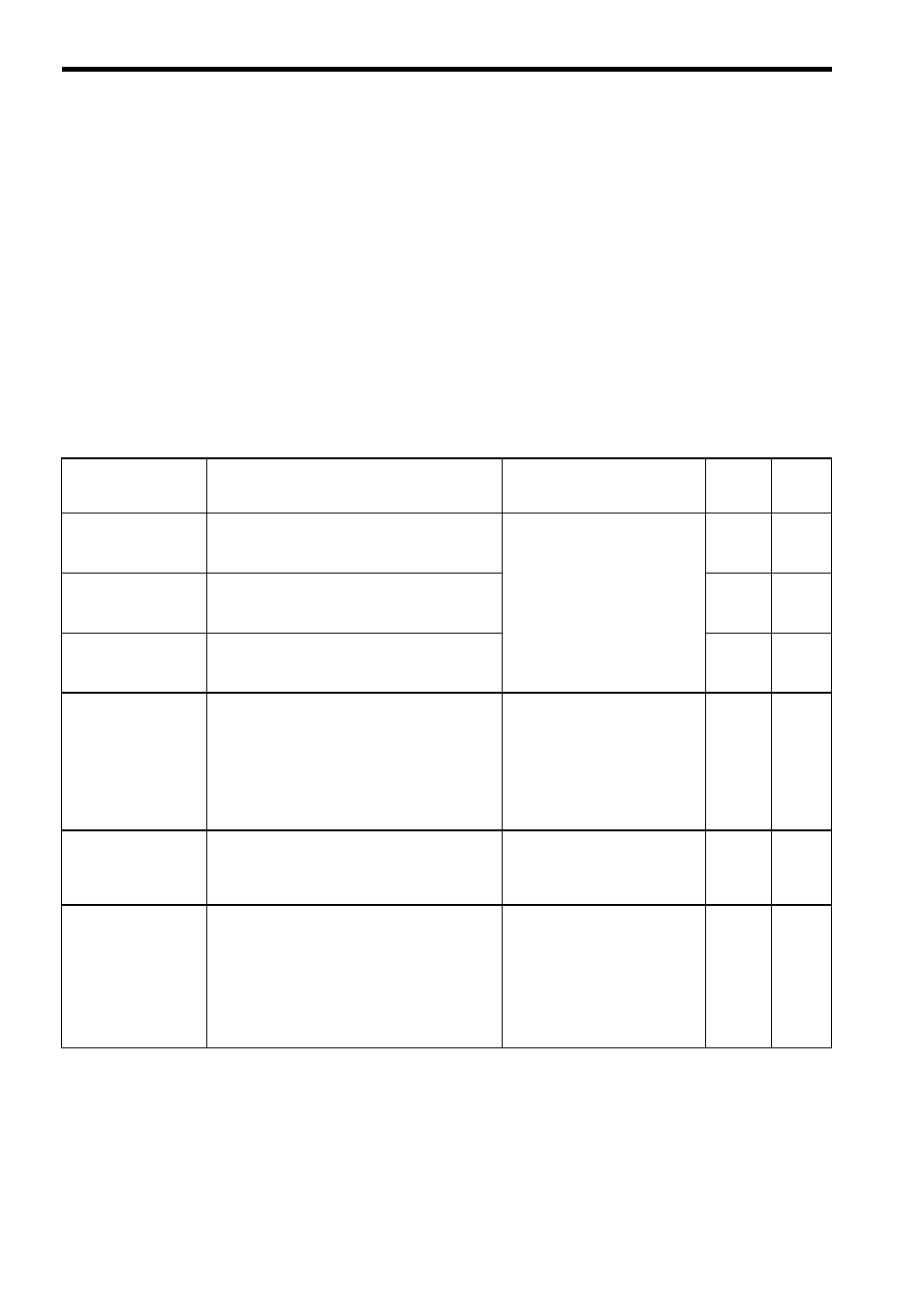
(2) Positioning Time Reduction Functions
Function Name and
Related Parameters
Description
Features
Valid
Control
Modes
Refer-
ence
Section
Feed-forward
Pn109
Pn10A
Feed-forward compensation for the position refer-
ence is added to the speed reference.
Adjustment is easy.
The system will be unstable if a
large value is set, possibly result-
ing in overshooting or vibration.
Position
9.4.1
Torque feed-forward
Pn002
Pn400
Inputs torque feed-forward to the torque reference
input terminal and adds to the internal torque ref-
erence at the speed control.
Speed
9.4.2
Speed feed-forward
Pn207
Pn300
Inputs speed feed-forward to the speed reference
input terminal and adds to the internal speed refer-
ence at the position control.
Position
9.4.3
Mode Switch
(P/PI Switching)
Pn10B
Pn10C
Pn10D
Pn10E
Pn10F
Switches from PI control to P control using the
value of an internal servo variable in a parameter
(torque, speed, acceleration, or position error) as a
threshold value.
The setting for automatic switch-
ing between PI and P control is
easy.
Position
Speed
9.4.5
Speed Feedback
Compensation
Pn110
Pn111
This function cannot be used for SERVOPACKs
of 22 kW or more.
−
−
9.4.8
Gain Switching
Pn100
Pn101
Pn102
Pn104
Pn105
Pn106
Automatically switches each parameter for speed
loop gain (Kv), speed loop integral time constant
(Ti), and position loop gain (Kp) by external signal
or according to condition:
Whether position reference is specified or not, or
Position error level, or
AND logic of the above two determined condi-
tions.
−
Position
Speed
9.4.9