3 position reference, 1) input/output signal timing example, Important – Yaskawa Sigma II Series SGMVH User Manual
Page 235
8 Operation
8.6.3 Position Reference
8-54
8.6.3 Position Reference
The servomotor positioning is controlled by inputting a pulse train reference.
The pulse train output form from the host controller corresponds to the following:
• Line-driver Output
• +24V Open-collector output
• +12V Open-collector output
• +5V Open-collector output
Precautions for Open-collector Output
When the open-collector output is used, input signal noise margin lowers. When a position error caused by
the noise occurs, change the parameter as follows:
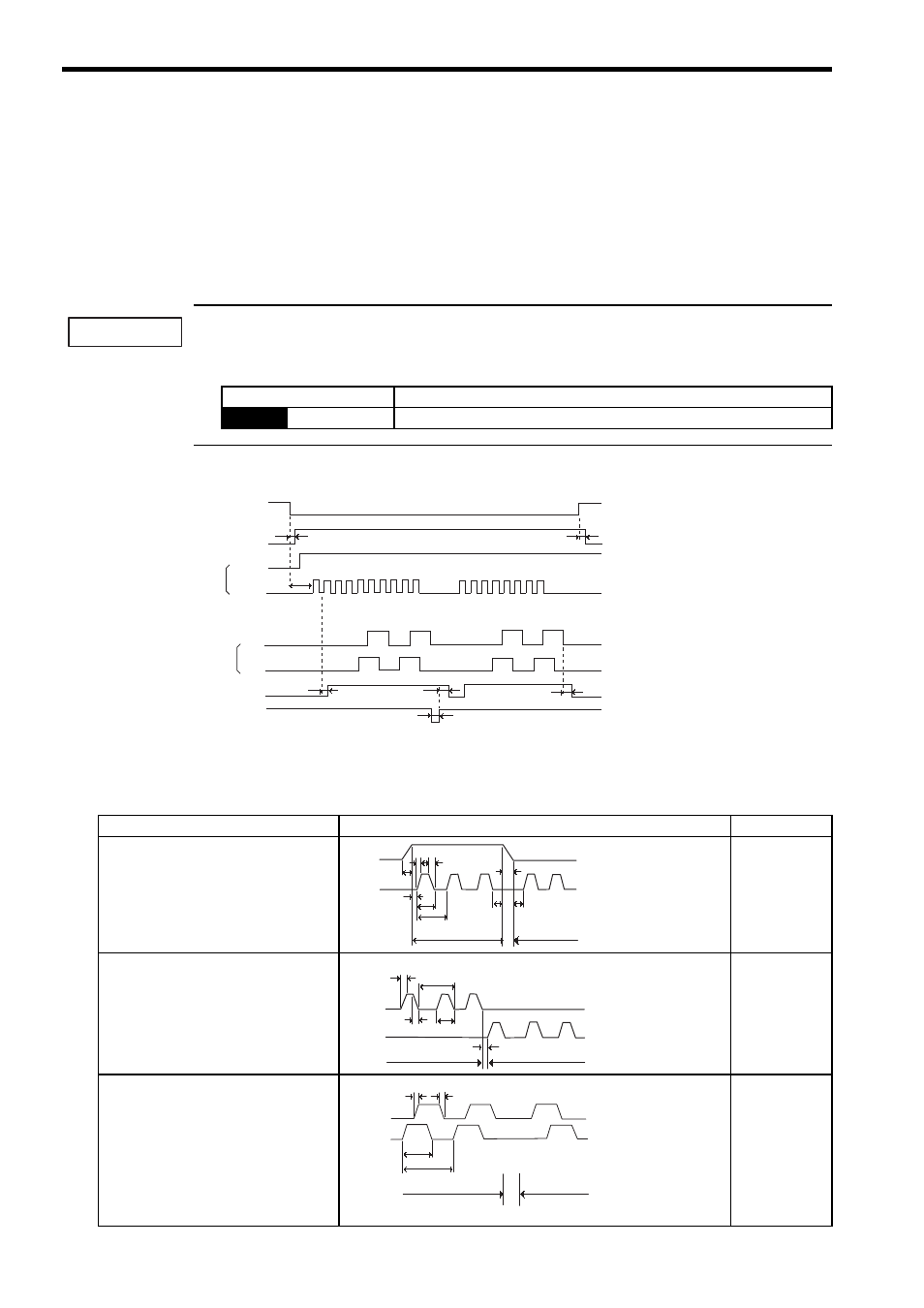
(1) Input/Output Signal Timing Example
Note: 1. The interval from the time the servo ON signal is turned ON until a reference pulse is input must
be at least 40 ms, otherwise the reference pulse may not be received by the SERVOPACK.
2. The error counter clear signal must be ON for at least 20
μs.
Parameter
Description
Pn200
n.1
Reference input filter for open-collector signal
IMPORTANT
Servo ON
Baseblock
Sign + pulse train
Release
t1
≤ 30 ms
t2
≤ 6 ms
(When parameter Pn506 is set to 0.)
t3
≥ 40 ms
Encoder pulses
t4, t5, t6
≤ 2 ms
t7
≥ 20 μs
t6
CN1-11
CN1-7
PAO
L
L
L
H
H
H
H
ON
ON
ON
CLR
PBO
t7
t5
t4
t3
t2
t1
/COIN
Table 8.3 Reference Pulse Input Signal Timing
Reference Pulse Signal Form
Electrical Specifications
Remarks
Sign and pulse train input
(SIGN and PULS signal)
Maximum reference frequency:
500 kpps
(For open-collector output: 200 kpps)
t1,t2
≤
0.1
μs
t3,t7
≤
0.1
μs
t4,t5,t6 > 3
μs
τ
≥
1.0
μs
(
τ
/T)
× 100
≤
50%
Sign (SIGN)
H = Forward
reference
L = Reverse
reference
CW pulse and CCW pulse
Maximum reference frequency:
500 kpps
(For open-collector output: 200 kpps)
t1,t2
≤
0.1
μs
t3 > 3
μs
τ
≥
1.0
μs
(
τ
/T)
× 100
≤
50%
−
Two-phase pulse train with 90
°
phase differential (phase A and
phase B)
Maximum reference frequency
×1 input pulse multiplier: 500 kpps
×2 input pulse multiplier: 400 kpps
×4 input pulse multiplier: 200 kpps
t1,t2
≤
0.1
μs
τ
≥
1.0
μs
(
τ
/T)
× 100 = 50%
Switching of
the input pulse
multiplier
mode is done
with parameter
Pn200.0 set-
ting.
Forward
reference
Reverse
reference
t1 t2
t3
t4
t5
t6
t7
T
τ
SIGN
PULS
Forward
reference
Reverse
reference
t2
t3
T
τ
CW
CCW
t1
Phase B leads
phase A by 90
°
Phase B lags
phase A by 90
°
Forward reference
Reverse reference
Phase B
Phase A
t2
τ
T
t1