4 setting for holding brakes – Yaskawa Sigma II Series SGMVH User Manual
Page 203
8 Operation
8.3.4 Setting for Holding Brakes
8-22
8.3.4 Setting for Holding Brakes
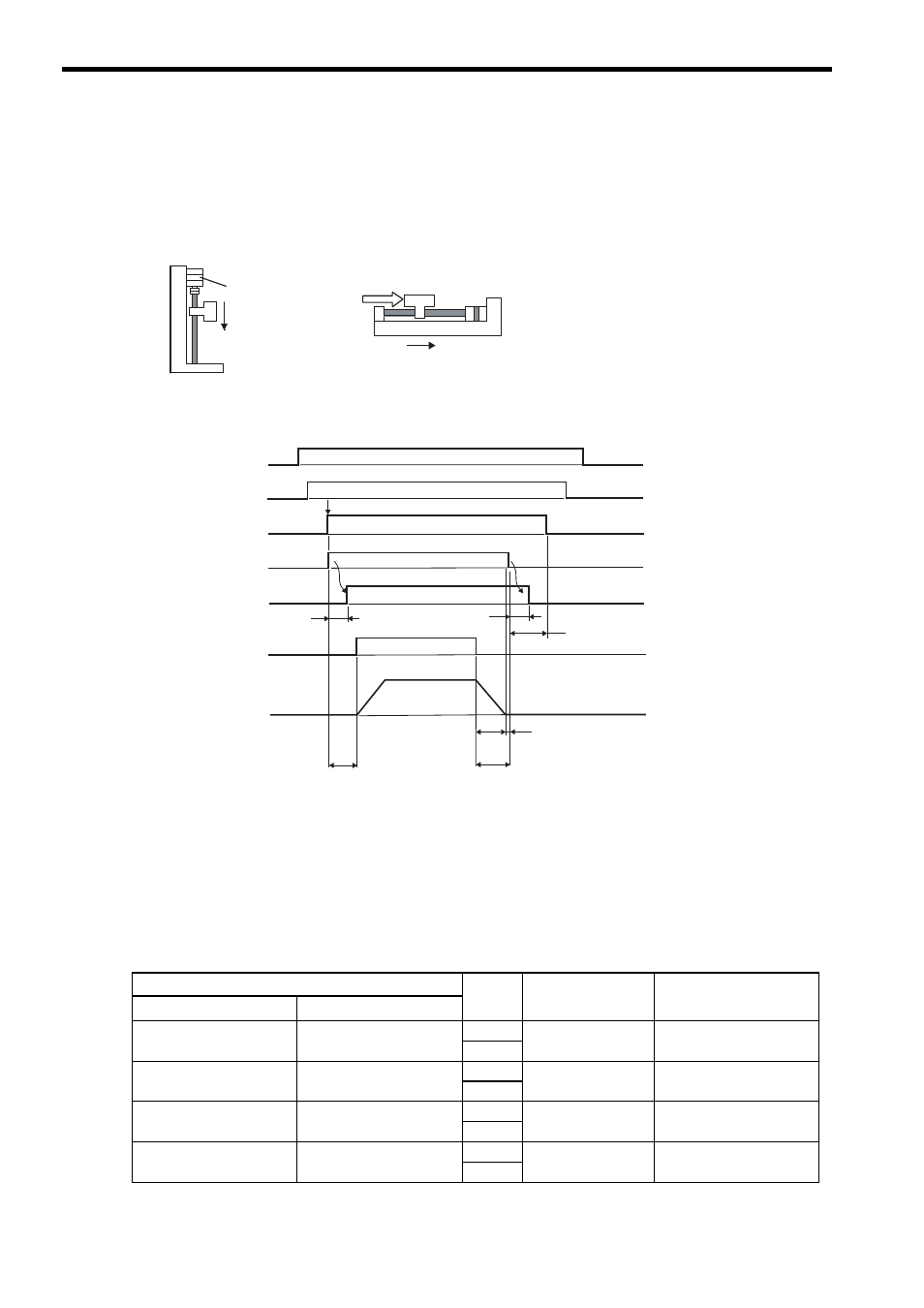
The holding brake is used when a SERVOPACK controls a vertical axis. In other words, a servomotor with
brake prevents the movable part from shifting due to gravity when the SERVOPACK power goes OFF. (Refer to
8.1.4 Servomotor with Brakes.)
There is a delay in the braking operation. Set the following ON/OFF timing. The timing can be easily set using
the brake interlock output signal.
* 1. The servo ON signal and holding brake power supply may be turned ON simultaneously.
* 2. The operation delay time of the brake depends on the model. For details, refer to Table 8.1 Brake Operation Delay Time.
* 3. Allow a period of 200 ms before the speed reference is input after the brake power supply is turned ON.
* 4. The servomotor stop time is shown by t
0
. Refer to Table 8.2 Calculation Method for Servomotor Stop Time for the
calculation of t
0
.
* 5. Always turn OFF the brake power supply after the servomotor comes to a stop. Usually, set t
0
+t
1
to 1 or 2 seconds.
* 6. Turn OFF the servo ON signal 0.2 to 1.0 second after the brake power supply is turned OFF.
Note: The above operation delay time is an example when the power supply is turned ON
and OFF on the DC side.
Be sure to evaluate the above times on the actual equipment before using the application.
Table 8.1 Brake Operation Delay Time
Model
Voltage
Brake Open Time
(ms)
Brake Operation Time
(ms)
1500 min
-1
800 min
-1
SGMVH-2B, 3Z
–
90V
500 max.
150 max.
24V
SGMVH-3G
SGMVH-2B
90V
500 max.
150 max.
24V
SGMVH-4E, 5E
SGMVH-3Z
90V
550 max.
320 max.
24V
SGMVH-7E
SGMVH-3G
90V
700 max.
320 max.
24V
Servomotor
Vertical Shaft
Holding brake
Prevents the servomotor
from shifting when
the power is OFF.
Shaft with External Force Applied
Servomotor
External
force
Prevents the servomotor from
shifting due to external force.
OFF
OFF
OFF
OFF
Brake release
ON
ON
ON
ON
*1
*2
*4
*5
*6
*3
200 ms or more
200 ms to 1.0 second
0V
*2
SERVOPACK main
power
SERVOPACK control
power
Servo ON
Holding brake power
Brake contact part
(lining)
Speed reference
Motor speed
t0
t0+t1
t1