Programming and parameters 3-51 – Rockwell Automation 22D PowerFlex 40P User Manual, FRN 3 User Manual
Page 97
Programming and Parameters
3-51
E202
Options
(Cont.)
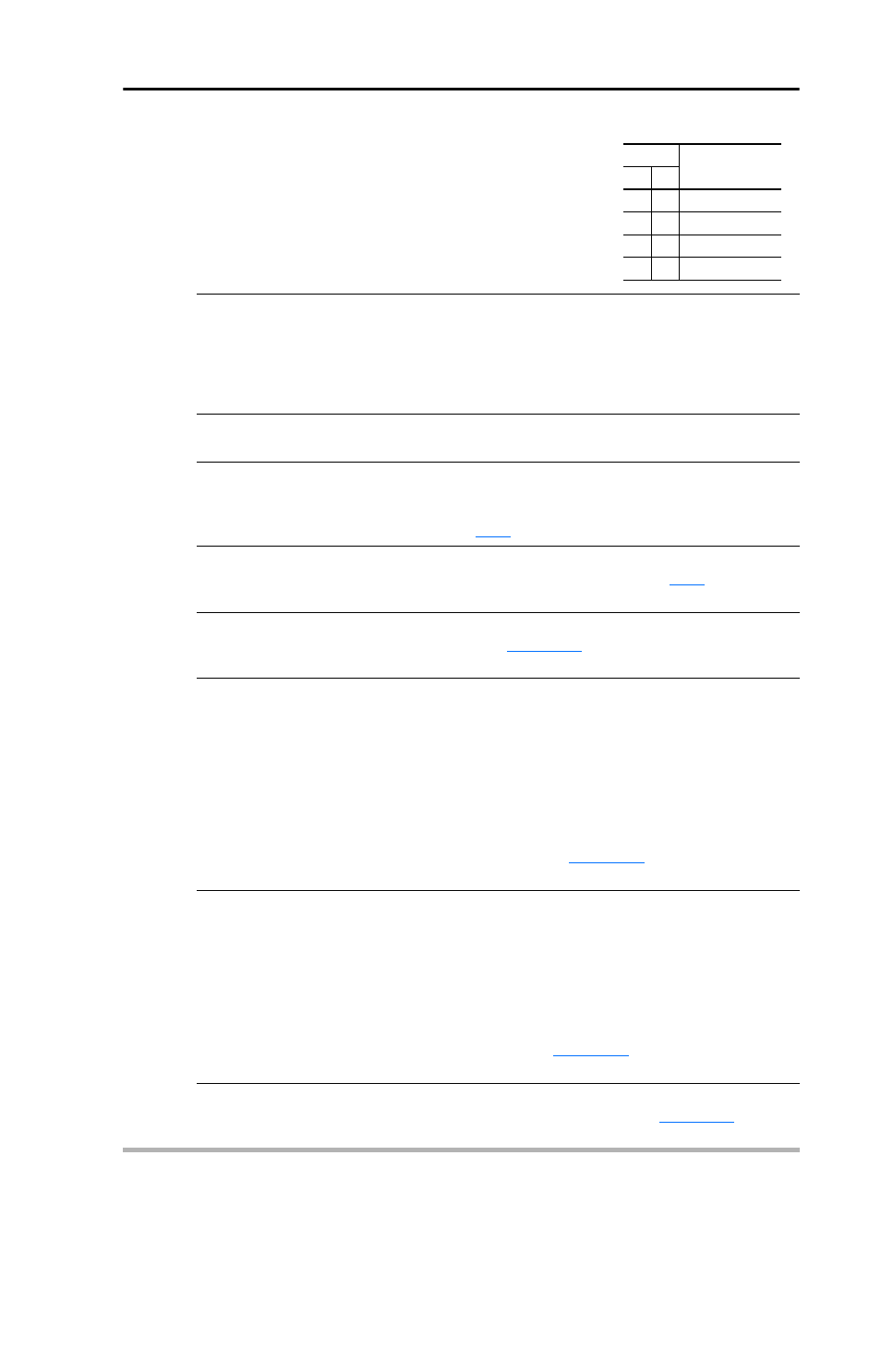
28 “Acc/Dec Sel2”
If active, can determine which
Accel/Decel time will be used for
all ramp rates except jog. Can
be applied to one input only.
29 “Precharge En”
Forces drive into precharge state. Typically controlled by
auxiliary contact on the disconnect at the DC input to the
drive. If this input is assigned, it must be energized for the
pre-charge relay to close and for the drive to run. If it is
de-energized, the pre-charge relay will open and the drive will
coast to a stop.
30 “Inertia Dcel”
Forces drive into Inertia Ride-Through state. The drive will
attempt to regulate the DC bus at the current level.
31 “Sync Enable”
Must be used in order to hold the existing frequency when
Sync Time is set to enable speed synchronization. When this
input is released the drive will accelerate to the commanded
frequency in
E214
[Sync Time].
32 “Traverse Dis”
When an input is programmed the traverse function will be
disabled while this input is active. Refer to
[Max
Traverse]
33 “Home Limit”
In Positioning mode, this indicates the drive is at the home
position. Refer to
for detailed information on
positioning.
34 “Find Home”
In Positioning mode this causes the drive to return to the
Home position when a start is issued. It does this by using
the [Find Home Freq] and [Find Home Direction] until the
“Home Limit” input is activated. If it passes this point, it then
runs in the reverse direction at 1/10th the frequency of [Find
Home Freq] until the “Home Limit” is activated again. As long
as this input is active, any start command will cause the drive
to enter the homing routing. However, it only functions if in
Positioning mode. Once the Find Home routine has finished,
the drive will stop. Refer to
for detailed
information on positioning.
35 “Hold Step”
In Positioning mode, this input over-rides other inputs and
causes the drive to remain at it’s current step (running at zero
speed once it reaches its position) until released. While in
“Hold”, the drive will ignore any digital input command which
would normally result in a move to a new step. However,
timers continue to run. Therefore, when the Hold is removed,
the drive must see any required digital inputs transition (even
if they already transitioned during the hold), but it does not
reset any timer. Refer to
on positioning.
36 “Pos Redefine”
In Positioning mode, this input resets the home position to the
current position of the machine. Refer to
for
detailed information on positioning.
Option
Description
28 1
0
0
Acc/Dec 1
0
1
Acc/Dec 2
1
0
Acc/Dec 3
1
1
Acc/Dec 4