Pid reference and feedback, Pid reference and feedback . . . . . . . . . . g-4, G-4 pid set up – Rockwell Automation 22D PowerFlex 40P User Manual, FRN 3 User Manual
Page 184
G-4
PID Set Up
PID Reference and Feedback
Parameter
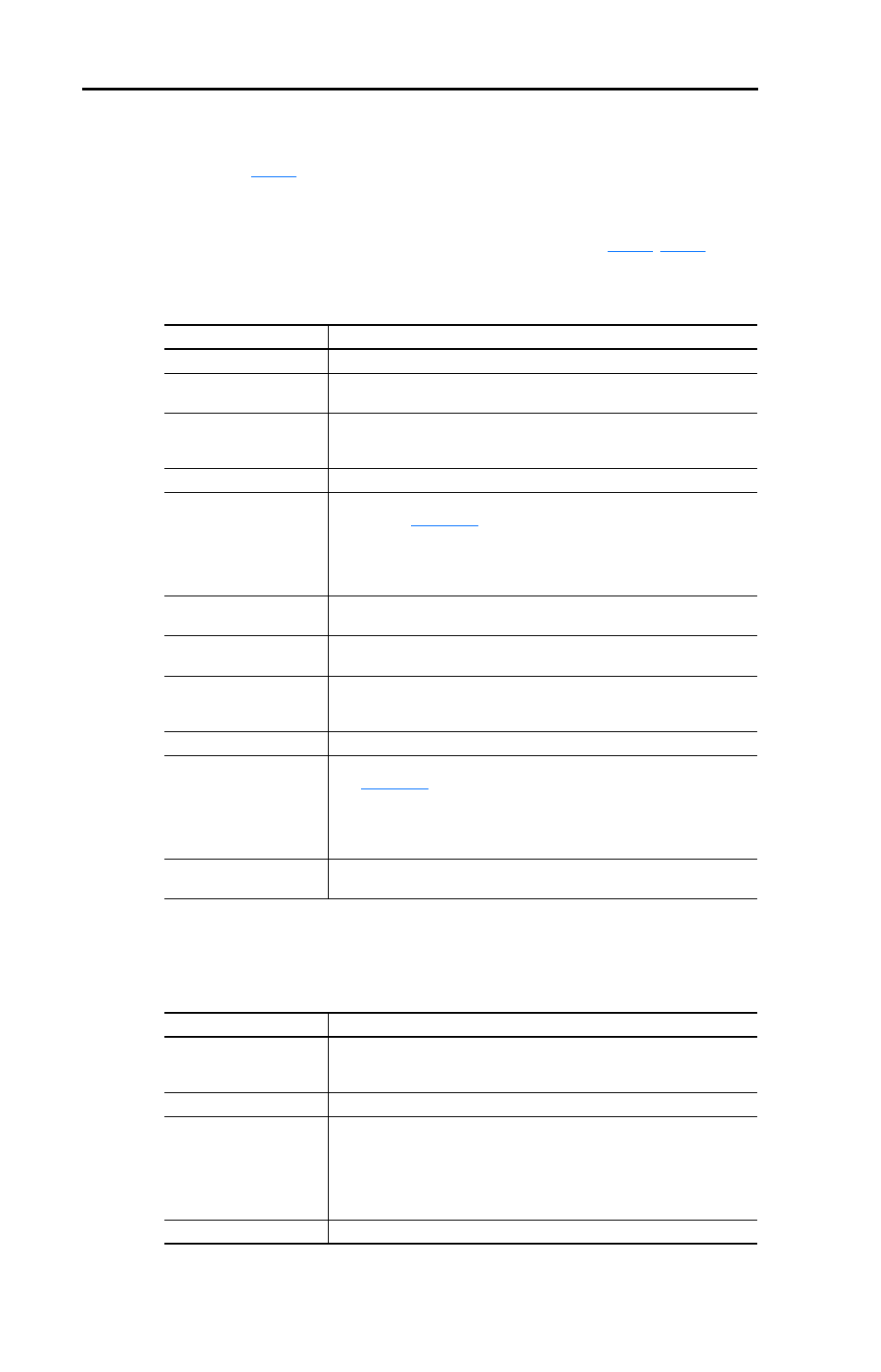
[PID Ref Sel] is used to enable the PID mode (A132 = 0
“PID Disabled”) and to select the source of the PID Reference. If A132
[PID Ref Sel] is not set to 0 “PID Disabled”, PID can still be disabled by
select programmable digital input options (parameters
as “Jog”, “Local” or “PID Disable”.
Table G.A A132 [PID Ref Sel] Options
A133 [PID Feedback Sel] is used to select the source of the PID
feedback.
Table G.B A133 [PID Feedback Sel] Options
Option
Description
0 “PID Disabled”
Disables the PID loop (default setting)
1 “PID Setpoint“
Selects Exclusive Control. A137 [PID Setpoint] will be used to set the
value of the PID Reference
2 “0-10V Input”
Selects Exclusive Control. Selects the 0-10V Input. Note that the PID will
not function with a bipolar analog input. It will ignore any negative
voltages and treat them like a zero.
3 “4-20mA Input”
Selects Exclusive Control. Selects the 4-20mA Input.
4 “Comm Port”
Selects Exclusive Control. The reference word from a communication
network (see
for details on the reference word) such as
Modbus RTU or DeviceNet becomes the PID Reference. The value sent
over the network is scaled so that P035 [Maximum Freq] x 10 = 100%
reference. For example, with [Maximum Freq] = 60 Hz, a value of 600
sent over the network would represent 100% reference.
5 “Encoder”
Selects Exclusive Control. Encoder or Pulse train will be used as an input
for the PID Reference.
6 “Setpnt, Trim”
Selects Trim Control. A137 [PID Setpoint] will be used to set the value of
the PID Reference.
7 “0-10V, Trim”
Selects Trim Control. Selects the 0-10V Input. Note that the PID will not
function with a bipolar analog input. It will ignore any negative voltages
and treat them like a zero.
8 “4-20mA, Trim”
Selects Trim Control. Selects the 4-20mA Input.
9 “Comm, Trim”
Selects Trim Control. The reference word from a communication network
(see
for details on the reference word) such as Modbus RTU
or DeviceNet becomes the PID Reference. The value sent over the
network is scaled so that P035 [Maximum Freq] x 10 = 100% reference.
For example, with [Maximum Freq] = 60 Hz, a value of 600 sent over the
network would represent 100% reference.
10 “Encoder,Trim”
Selects Trim Control. Encoder or Pulse train will be used as a trim input
for the PID Feedback
Option
Description
0 “0-10V Input”
Selects the 0-10V Input (default setting). Note that the PID will not
function with a bipolar analog input. It will ignore any negative voltages
and treat them like a zero.
1 “4-20mA Input“
Selects the 4-20mA Input.
2 “Comm Port”
The reference word from a communication network (see Appendix C of
the PowerFlex 40P User Manual for details on the reference word) such
as Modbus RTU or DeviceNet becomes the PID Feedback. The value
sent over the network is scaled so that P035 [Maximum Freq] x 10 =
100% Feedback. For example, with [Maximum Freq] = 60 Hz, a value of
600 sent over the network would represent 100% Feedback.
3 “Encoder”
Encoder or Pulse train will be used as an input for the PID Feedback.