7 trouble, Trouble, 4device control (dctrl) – Lenze 8400 BaseLine C User Manual
Page 60
4
Device control (DCTRL)
4.2
Device states
60
Lenze · 8400 BaseLine C · Reference manual · DMS 1.6 EN · 01/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2.7
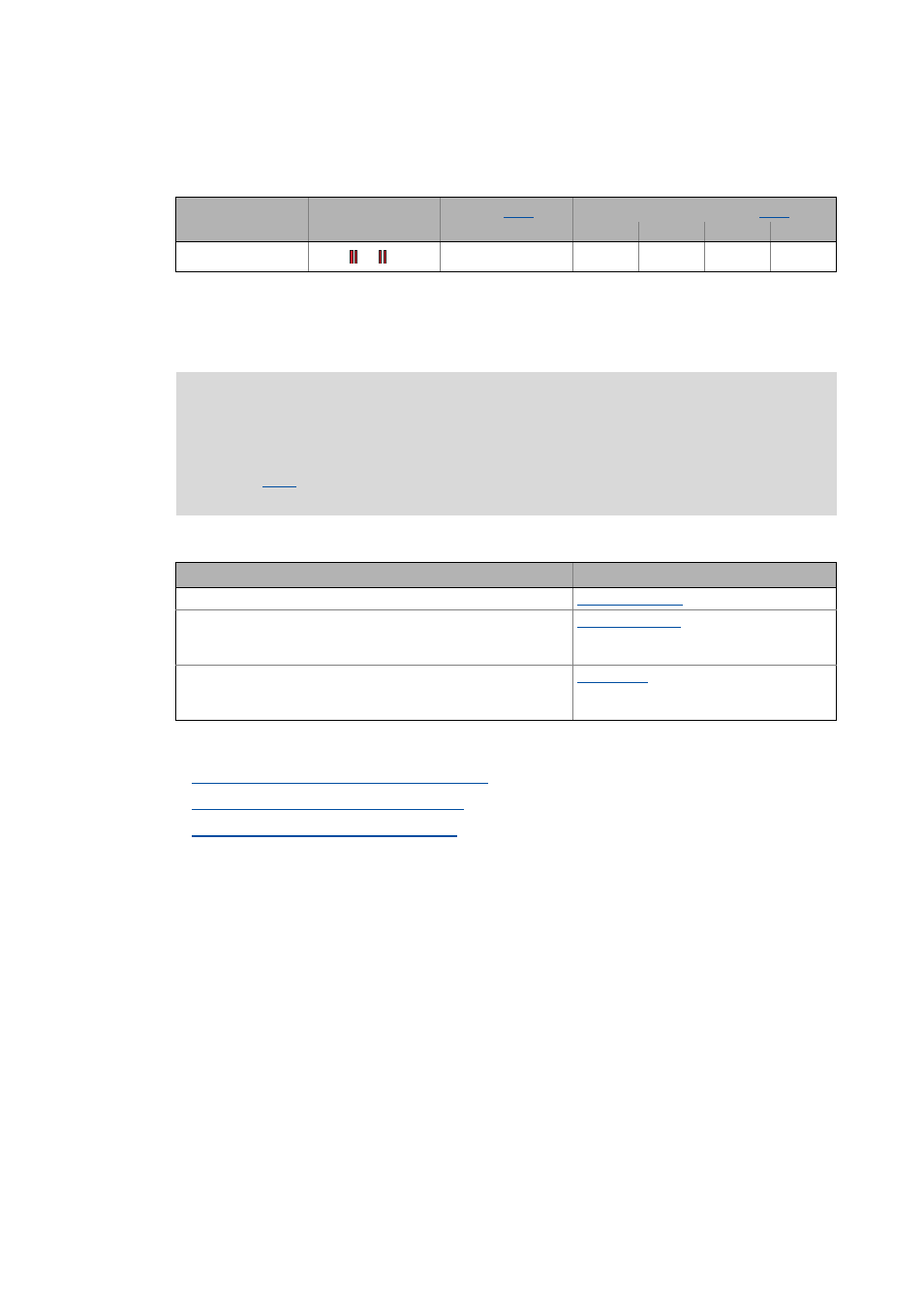
Trouble
In the "Trouble" device state
• is the controller if monitoring has caused a "Trouble" error response.
• the motor has no torque (is coasting) due to the inhibit of the inverter.
Depending on certain conditions a state change takes place based on the "Trouble" device state.
Related topics:
Process data assignment for control via CAN
Basics on error handling in the controller
Error messages of the operating system
LED DRIVE READY
LED DRIVE ERROR
Display in status word 1 (
Bit 11
Bit 10
Bit 9
Bit 8
OFF
Trouble
0
1
1
1
Note!
The "Trouble" device state is automatically abandoned if the error cause has been remo-
ved.
If in
the "Inhibit at trouble" auto-start option is activated , an explicit deactivation
of the controller inhibit is required for leaving the state.
Change condition
Changeover to the device state
The error cause is no longer active.
Control bit "EnableOperation" in control word wCANControl = "1"
AND terminal RFR = HIGH level (controller enable)
AND the message has been cancelled.
Control bit "EnableOperation" in control word wCANControl = "0"
OR terminal RFR = LOW level (controller inhibit)
AND the message has been cancelled.