9system bus "can on board – Lenze 8400 BaseLine C User Manual
Page 191
Lenze · 8400 BaseLine C · Reference manual · DMS 1.6 EN · 01/2014 · TD05
191
9
System bus "CAN on board"
9.6
Process data transfer
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The communication parameters such as the transmission mode and cycle time can be set freely for
every PDO and independently of the settings of other PDOs:
Blocking time
In
, an "inhibit time" can be set that defines the shortest transmission cycle for the "asyn-
chronous - manufacturer-specific/device-profile specific" transmission type.
Example: Cycle time = 500 ms, blocking time = 100 ms, sporadic data change:
• In case of a sporadic data change < 500 ms, fastest transmission is every 100 ms (event-cont-
rolled transmission). The transmission cycle timer is reset to 0 if the transmission has been trig-
gered in an event-controlled manner.
• In case of a sporadic data change > 500 ms, fastest transmission is every 500 ms due to the set
blocking time (cyclic transmission).
Tip!
The setting can also be carried out via the following CANopen objects:
•
: Communication parameters for RPDO1 ... RPDO2
•
: Communication parameters for TPDO1 ... TPDO2
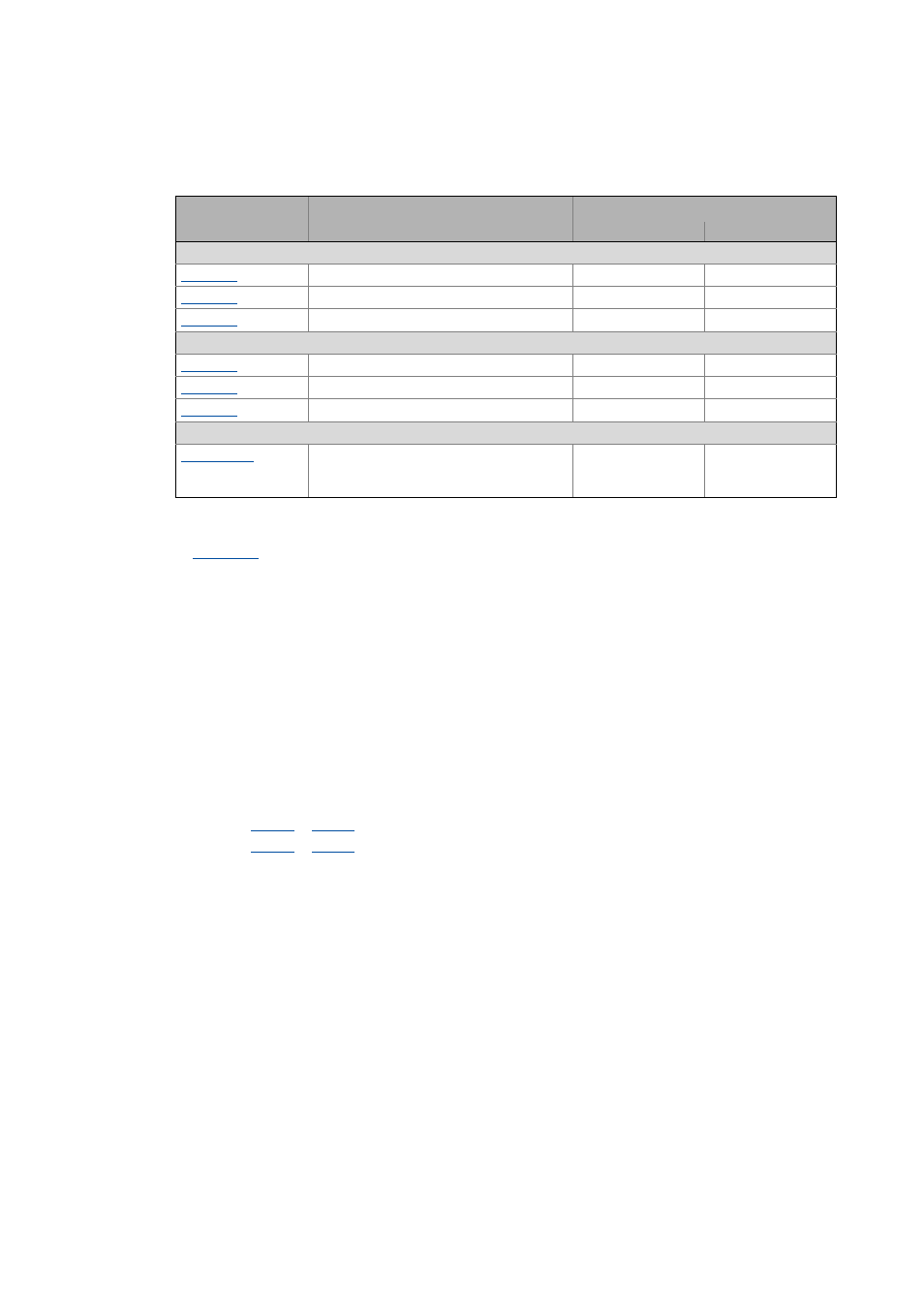
Parameter
Info
Lenze setting
Value Unit
CAN1_OUT
Transmission mode
254
Blocking time
0 ms
Cycle time
0 ms
CAN2_OUT
Transmission mode
254
Blocking time
0 ms
Cycle time
0 ms
CAN1_IN ... CAN2_IN
Transmission mode CAN1_IN ... CAN2_IN
• For RPDO, it serves as monitoring setting
in the case of sync-controlled PDOs.
254