2 motorident, 3 safetorqueoff, Motorident – Lenze 8400 BaseLine C User Manual
Page 56: Safetorqueoff, Device state, 4device control (dctrl), Stop
4
Device control (DCTRL)
4.2
Device states
56
Lenze · 8400 BaseLine C · Reference manual · DMS 1.6 EN · 01/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
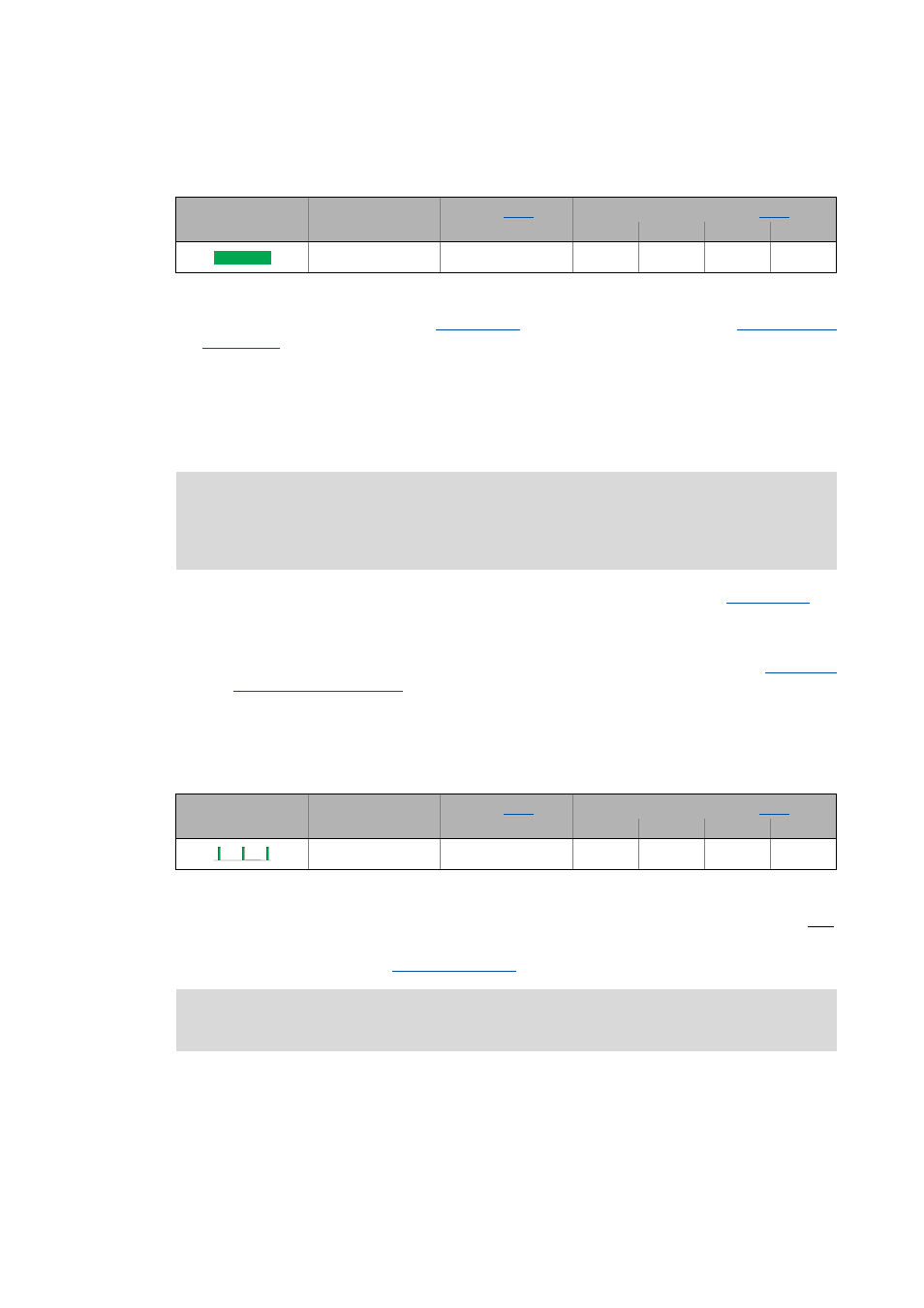
4.2.2
MotorIdent
In the "MotorIdent" device state
• is the controller when being in the "
" state and having activated the "
" device command and being enabled.
• the application remains active.
• all system interfaces (IO, bus systems, etc.) remain active.
• error monitoring remains active
• the inverter is controlled independently of the setpoint sources.
After the motor parameter identification is completed, the state changes back to "
".
Tip!
Detailed information on motor parameter identification can be found in the "
" subchapter on motor control.
4.2.3
SafeTorqueOff
In the "SafeTorqueOff" device state
• the controller can only be if a safety module is connected and the power section is supplied and
at least one of the two safe inputs SI1/SI2 is set to LOW level.
• the next transaction to the "
" state takes place.
LED DRIVE READY
LED DRIVE ERROR
Display in status word 1 (
Bit 11
Bit 10
Bit 9
Bit 8
OFF
MotorIdent
0
0
1
0
Stop!
During motor parameter identification, the controller does not respond to setpoint
changes or control processes, (e.g. speed setpoints, quick stop, torque limitations).
LED DRIVE READY
LED DRIVE ERROR
Display in status word 1 (
Bit 11
Bit 10
Bit 9
Bit 8
OFF
SafeTorqueOff
1
0
1
0
Detailed and important information on the integrated safety system can be found in the
hardware manual!