L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 58
L-force | PLC Designer - SoftMotion
The SoftMotion drive interface
Variables of the AXIS_REF structure
58
L
DMS 5.2 EN 03/2011 TD17
1117
fSaveVelocity
REAL
0
Internal speed at cycle start
1120
fSetAcceleration
REAL
0
Specified acceleration in techn.
units/sec
2
1121
fActAcceleration
REAL
0
Current acceleration in techn.
units/sec
2
1122,13
fMaxAcceleration
REAL
100
Maximum acceleration in techn.
units/sec
2
1123
fSWMaxAcceleration REAL
100
Maximum acceleration for
implicit movements in techn.
units/sec
1125
bAccelerating
BOOL
FALSE
Axis is currently accelerating
1126
fMarkAcceleration
REAL
0
Internal acceleration mark
1127
fSaveAcceleration
REAL
0
Internal acceleration at cycle
start
1130
fSetDeceleration
REAL
0
Specified deceleration in techn.
units/sec
2
1131
fActDeceleration
REAL
0
Current deceleration in techn.
units/sec
2
1132,15
fMaxDeceleration
REAL
100
Maximum deceleration in techn.
units/sec
2
1133
fSWMaxDeceleration REAL
100
Maximum deceleration for
implicit movements in techn.
units/sec
1135
bDecelerating
BOOL
FALSE
Axis is currently decelerating
1137
fSaveDeceleration
REAL
0
Internal deceleration at cycle
start
1140
fSetJerk
REAL
0
Specified jerk in techn. units/sec
3
1141
fActJerk
REAL
0
Current jerk in techn. units/sec
3
1142,16
fMaxJerk
REAL
100
Maximum jerk in techn. units/
sec
3
1143
fSWMaxJerk
REAL
100
Maximum jerk for implicit
movements in techn. units/sec
1146
fMarkJerk
REAL
0
Internal jerk mark
1147
fSaveJerk
REAL
0
Internal jerk at cycle start
1150
fSetCurrent
REAL
0
Specified amperage (A)
1151
fActCurrent
REAL
0
Current amperage (A)
1152
fMaxCurrent
REAL
100
Maximum amperage (A)
1153
fSWMaxCurrent
REAL
0
Maximum amperage for implicit
movements in techn. units/sec
1160
fSetTorque
REAL
0
Specified torque in Nm or N
(linear)
1161
fActTorque
REAL
0
Current torque in Nm or N
(linear)
1162
fMaxTorque
REAL
0
Maximum torque in Nm or N
(linear)
1200,2
fSWLimitPositive
REAL
0
Position limit of positive
direction in techn. units
1201,3
fSWLimitNegative
REAL
0
Position limit of negative
direction in techn. units
1202
fCaptPosition
REAL
0
Capture position in techn. units
1204
bSWEndSwitchActive BOOL
FALSE
SW limit switch active
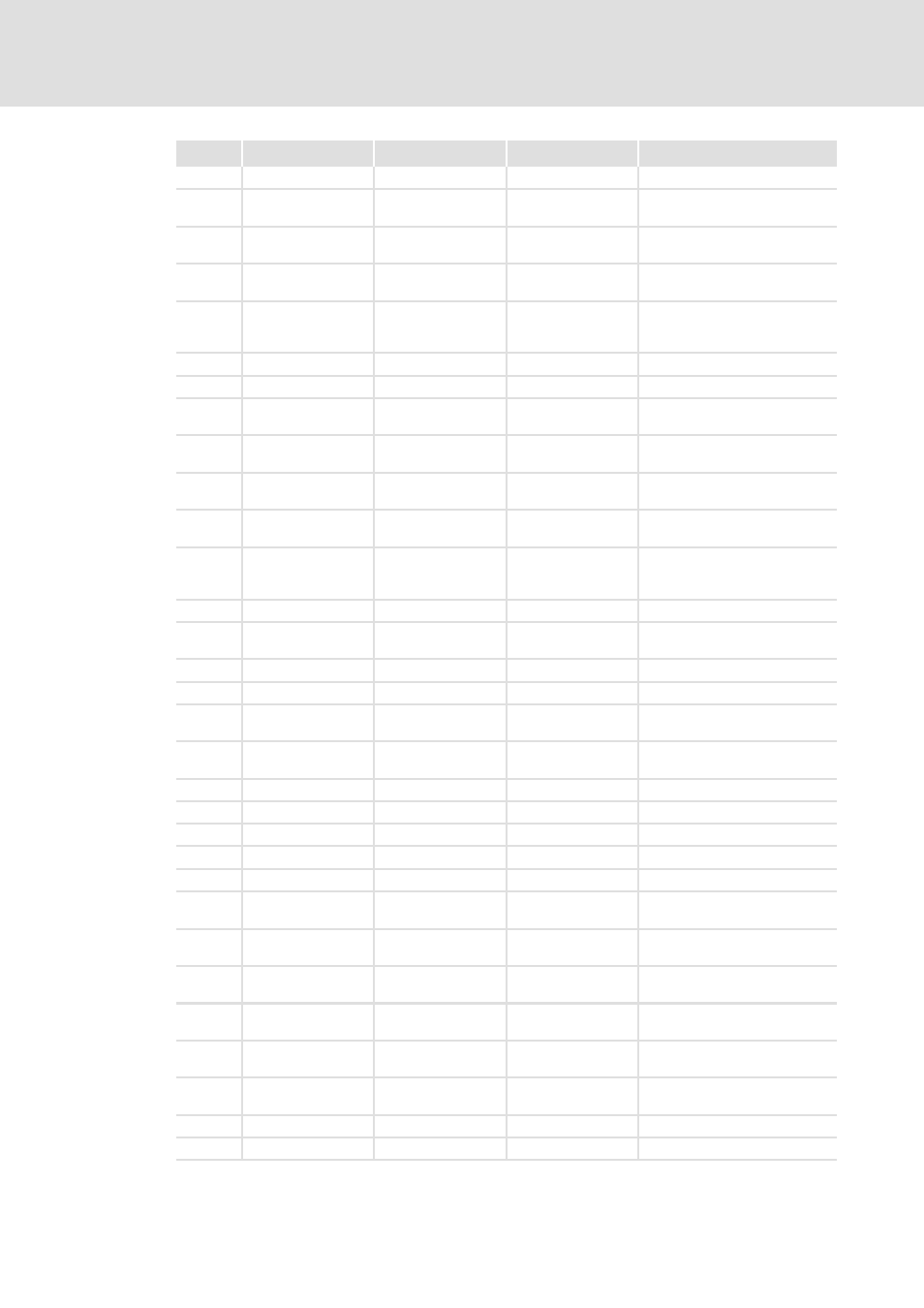
No.
Name
Data type
Init value
Description