L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 189
L-force | PLC Designer - SoftMotion
The SM_CNC.lib library
SMC_Interpolator
189
L
DMS 5.2 EN 03/2011 TD17
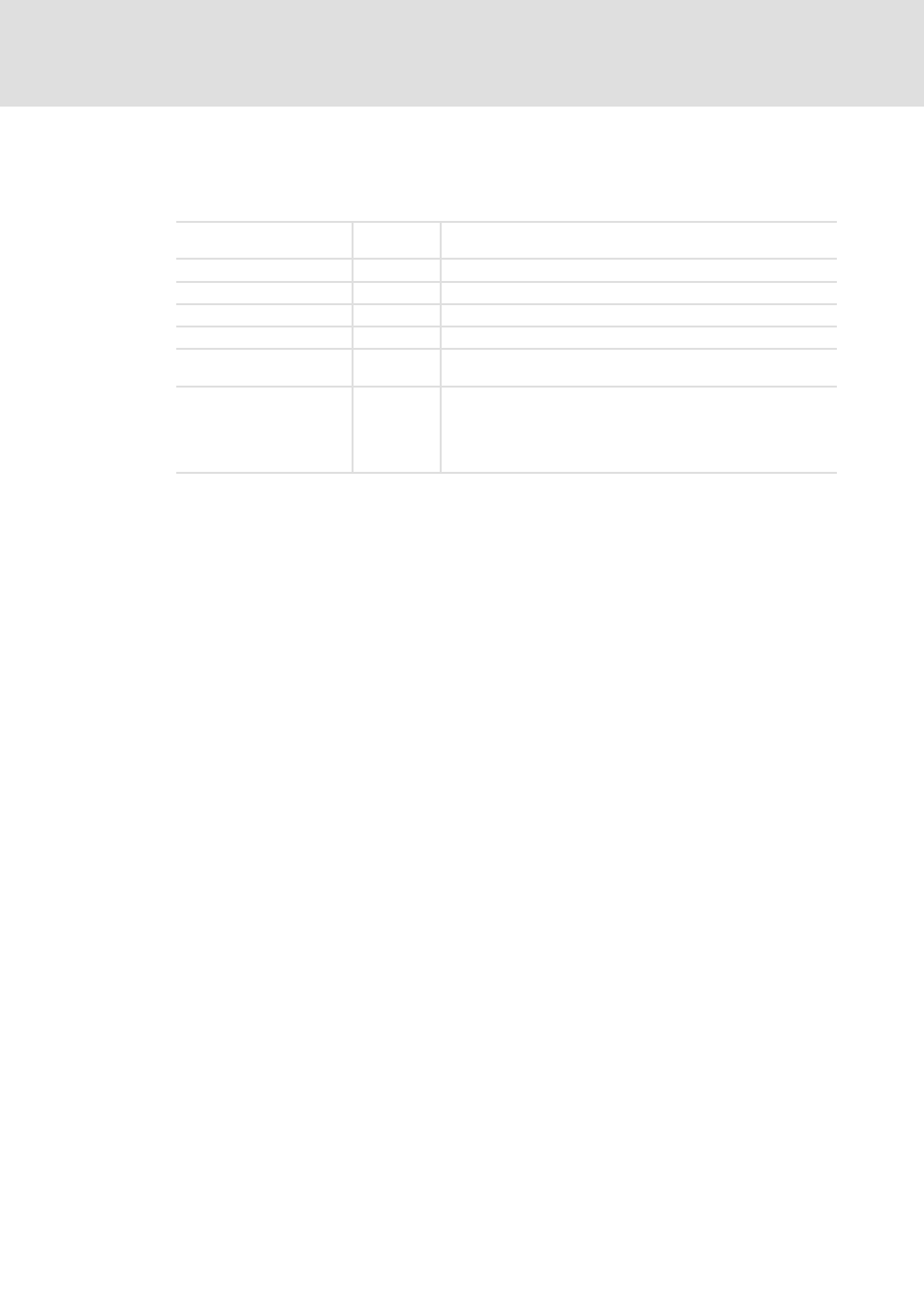
iStatus: SMC_INT_STATUS (INT)
This enum variable shows the current state of the program organisation unit. Possible
states:
bWorking: BOOL
This output assumes the value TRUE once list processing has begun and before it has been
completed (IPO_ACCEL, IPO_CONSTANT, IPO_DECEL or IPO_WAIT). Otherwise Working is
FALSE.
iActObjectSourceNo: INT
The SourceLine_Nr value of the GEOINFO object in the DataIn queue that is currently being
traversed can be found here. If SMC_Interpolator is not (or no longer) working (Working =
FALSE), -1 appears here.
dVel: LREAL
This variable contains the current velocity that results if an object moves from the previous
space coordinate to Set_Position within the time set in Ipo_Time.
vecActTangent: SMC_VECTOR3D
This structure contains the direction of the path specified in the Set_Position. If Vel = 0,
Act_Tangent is also filled with zeros.
iLastSwitch: INT
This variable contains the number of the most recently passed switch. If several switches
are passed in one cycle, only the last one will be shown.
dwSwitches: DWORD
This DWORD contains the current switching state of all switches from 1 to 32. Bit 0 of the
DWORD represents auxiliary mark 1, bit 31 for auxiliary mark 32. In contrast to
iLastHelpMark, like this can be ensured that no auxiliary marks are left out.
dWayPos: LREAL
See the information about the dLastWAyPos input for a description.
SMC_Interpolator will calculate and output the subsequent path position point on each
call, taking the specified parameters, the velocity history and the last path position into
account. Once the first GEOINFO object has been processed, it will be cleared from the
poqDataIn SMC_OUTQUEUE structure.
IPO_UNKNOWN
0
Internal state. State may not occur after a complete
SMC_Interpolator pass.
IPO_INIT
1
Initialisation state; DataIn is not and has not yet been full.
IPO_ACCEL
2
Program organisation unit is currently accelerating.
IPO_CONSTANT
3
Program organisation unit is currently moving at a constant velocity.
IPO_DECEL
4
Program organisation unit is currently decelerating.
IPO_FINISHED
5
Processing of the GEOINFO list is finished. Any other GEOINFO
objects that arrive in DataIn subsequently will not be processed.
IPO_WAIT
6
Program organisation unit is waiting because one of the situations
below has occurred:
Emergency_Stop = TRUE
Slow_Stop = TRUE and Vel = 0
Wait_At_Next_Stop = TRUE and Vel = 0