7 homing via digital hardware inputs (smc_homing), Homing via digital hardware inputs (smc_homing) – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 41
DMS 5.2 EN 03/2011 TD17
L
41
L-force | PLC Designer - SoftMotion
The SoftMotion drive interface
SM_DriveBasic.lib and automatic code generation
3.2.7
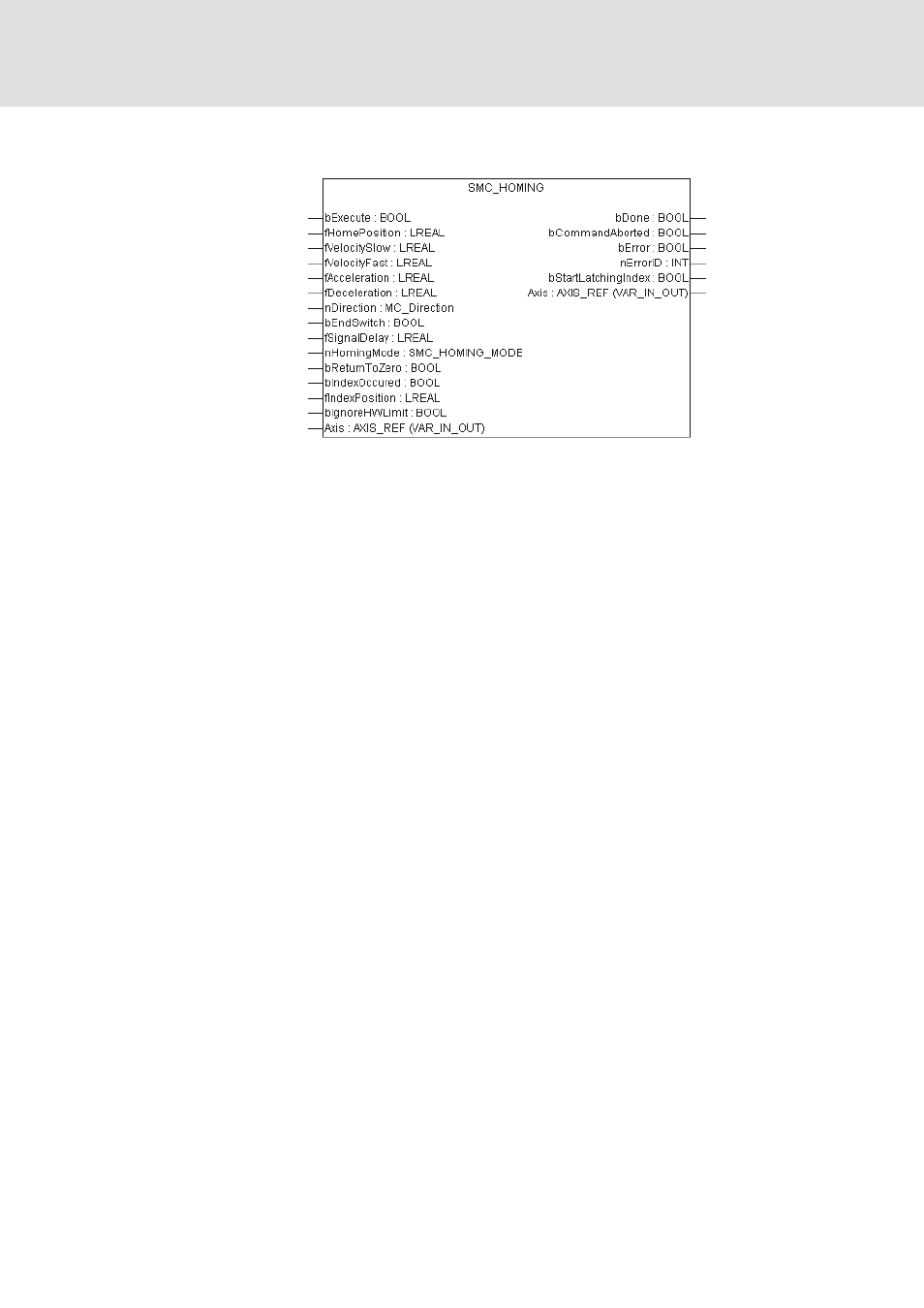
Homing via digital hardware inputs (SMC_Homing)
This function block is able to carry out the homing of an axis. For this a BOOL value which
typically is a hardware input acts as a switch-on.
If the block has been started with a rising edge in bExecute,by the use of the block
fVelocityFast it moves the axis in the direction specified by nDirection until bEndSwitch is
FALSE, i. e. until the reference switch is closed. Then the axis is decelerated and traversed
in the opposite direction with fVelocitySlow. In the position where the reference switch
opens (bEndSwitch = TRUE) the home position is set (fHomePosition) and the drive is
stopped.
Inputs (VAR_INPUT)
bExecute : BOOL (Default: FALSE)
The drive reference run will be started on a rising edge.
fHomePosition : REAL
Specification of the absolute position on the home position [u].
fVelocitySlow, fVelocityFast : REAL
Setpoint speeds for phases 1 and 2 in [u/s].
fAcceleration, fDeceleration : REAL
Setpoint acceleration and deceleration in [u/s²].
nDirection : MC_Direction (Default: negative)
Direction of the homing: permissible values: positive/negative.
bEndSwitch : BOOL (Default: TRUE)
Reference switch: TRUE (open), FALSE (closed).
fSignalDelay : REAL (Default: 0.0)
Transmission time of the reference switch in s. If a time >0 is specified, the block does not
use the position as home position where bEndSwicth became TRUE, but the position that
the axis fSignalDelay had a few seconds before.