L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 23
DMS 5.2 EN 03/2011 TD17
L
23
L-force | PLC Designer - SoftMotion
The SoftMotion drive interface
Control configuration for SoftMotion
In the case of the Speed ramp type, the user specifies (if supported by the libraries
integrated) the speed profile type for the motion-generating single and master/slave
blocks. "Trapezoid" results in a trapezoidal speed profile (constant acceleration in sections),
"sigmoidal" in a sin²-form speed profile (continuous acceleration), "parabolic" in a
continuous trapezoidal acceleration profile, and therefore a parabolic speed profile.
For the profiles "sigmoidal" and "parabolic", the jerk must also be set. This value is set by
selecting the element "fRampJerk" in AX_REF. The write access must be carried out from
the PLC application.
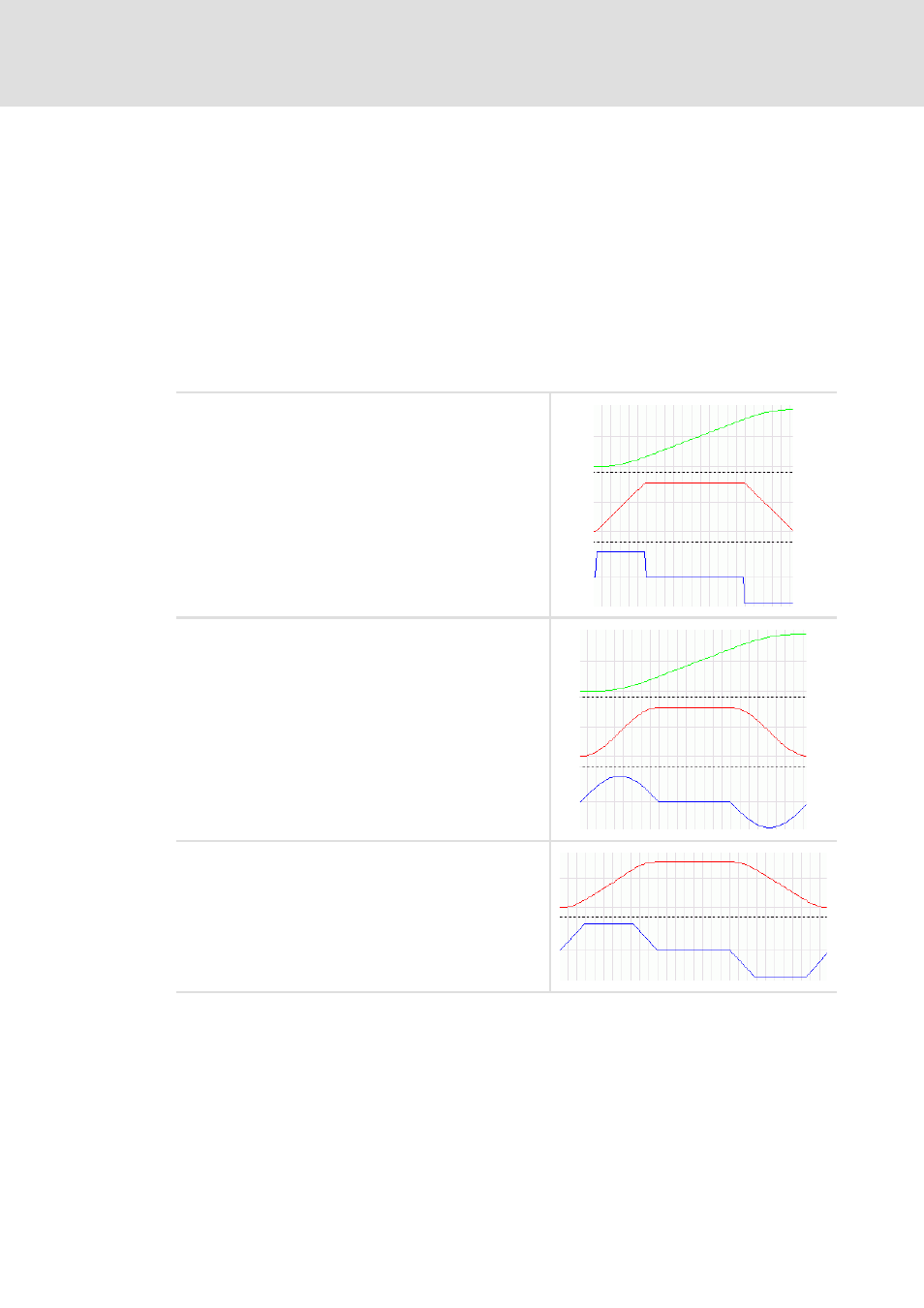
The following graphics show the effect of the different ramp modes for a positioning
process. The position is represented in green, the speed in red, and the acceleration in blue
colour.
In the case of the trapezoidal speed profile it can be seen that
steps occur during the acceleration.
In the case of the sigmoidal profile, the jerk is evaluated
additionally. This value can be changed by selecting the element
"fRampJerk" in AX_REF, the write access must be carried out
from the der PLC application.
A change is not necessary for most of the applications, the preset
default value should be kept.
In the case of the parabolic speed profile the acceleration adopts
a continuous trapezoidal profile the gradient of which is limited
by the jerk. For the speed a continuous parabolic profile results.
Only in the case of this profile the jerk can really be limited.