6 can communication times, L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 53
DMS 5.2 EN 03/2011 TD17
L
53
L-force | PLC Designer - SoftMotion
The SoftMotion drive interface
Drive element
3.3.1.6
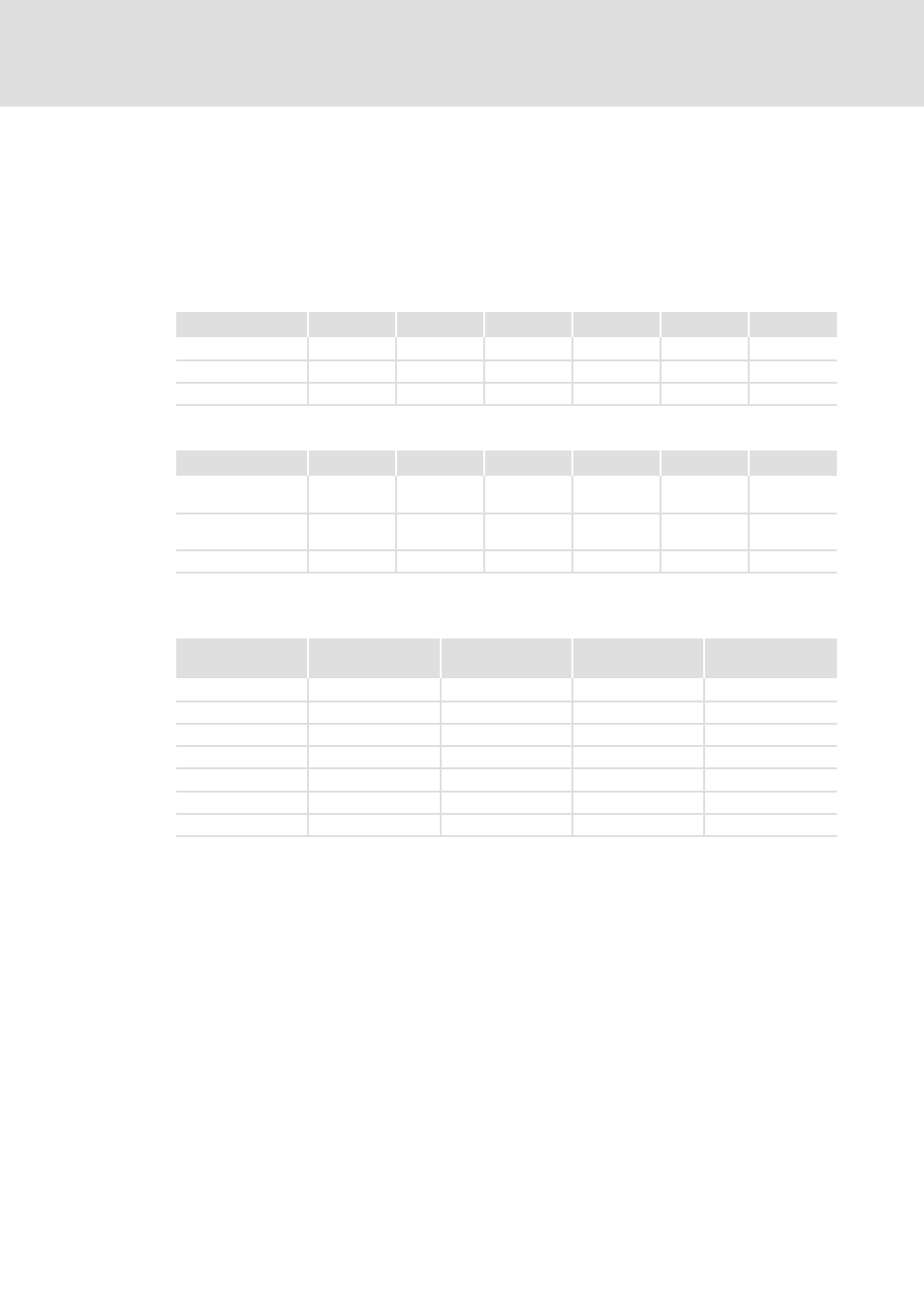
CAN communication times
The following values apply to the ECSxM axis module (Motion) and the 9400 Servo Drives
StateLine, provided that only one pair of set values and actual values, respectively, is
transmitted (e.g. SetPosition, ActPosition). If cyclic data transmission is additionally used,
the data traffic via CAN increases. Therefore a smaller number of drives can be activated in
the same cycle time.
Basic utilisation:
Per drive:
The following table specifies the maximum number of drives per cycle time in this
connection:
Telegram
Data bytes
Bit length
125 kbps
250 kbps
500 kbps
1 Mbps
Sync
0
47
0.376 ms
0.188 ms
0.094 ms
0.047 ms
SDO
8
111
0.888 ms
0.444 ms
0.222 ms
0.111 ms
Total
1.264 ms
0.632 ms
0.316 ms
0.158 ms
Telegram
Data bytes
Bit length
125 kbps
250 kbps
500 kbps
1 Mbps
Control word, target
position
8
111
0.888 ms
0.444 ms
0.222 ms
0.111 ms
Status word, current
position
8
111
0.888 ms
0.444 ms
0.222 ms
0.111 ms
Total
1.776 ms
0.888 ms
0.444 ms
0.222 ms
Max. number of
drives/cycle
125 kbps
250 kbps
500 kbps
1 Mbps
1 ms
0
0
1
3
2 ms
0
1
3
6
3 ms
1
2
5
10
4 ms
1
3
6
13
5 ms
2
4
8
17
6 ms
2
5
10
20
8 ms
3
6
13
27