9 smc_interpolator, Smc_interpolator, L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 185
L-force | PLC Designer - SoftMotion
The SM_CNC.lib library
SMC_Interpolator
185
L
DMS 5.2 EN 03/2011 TD17
7.9
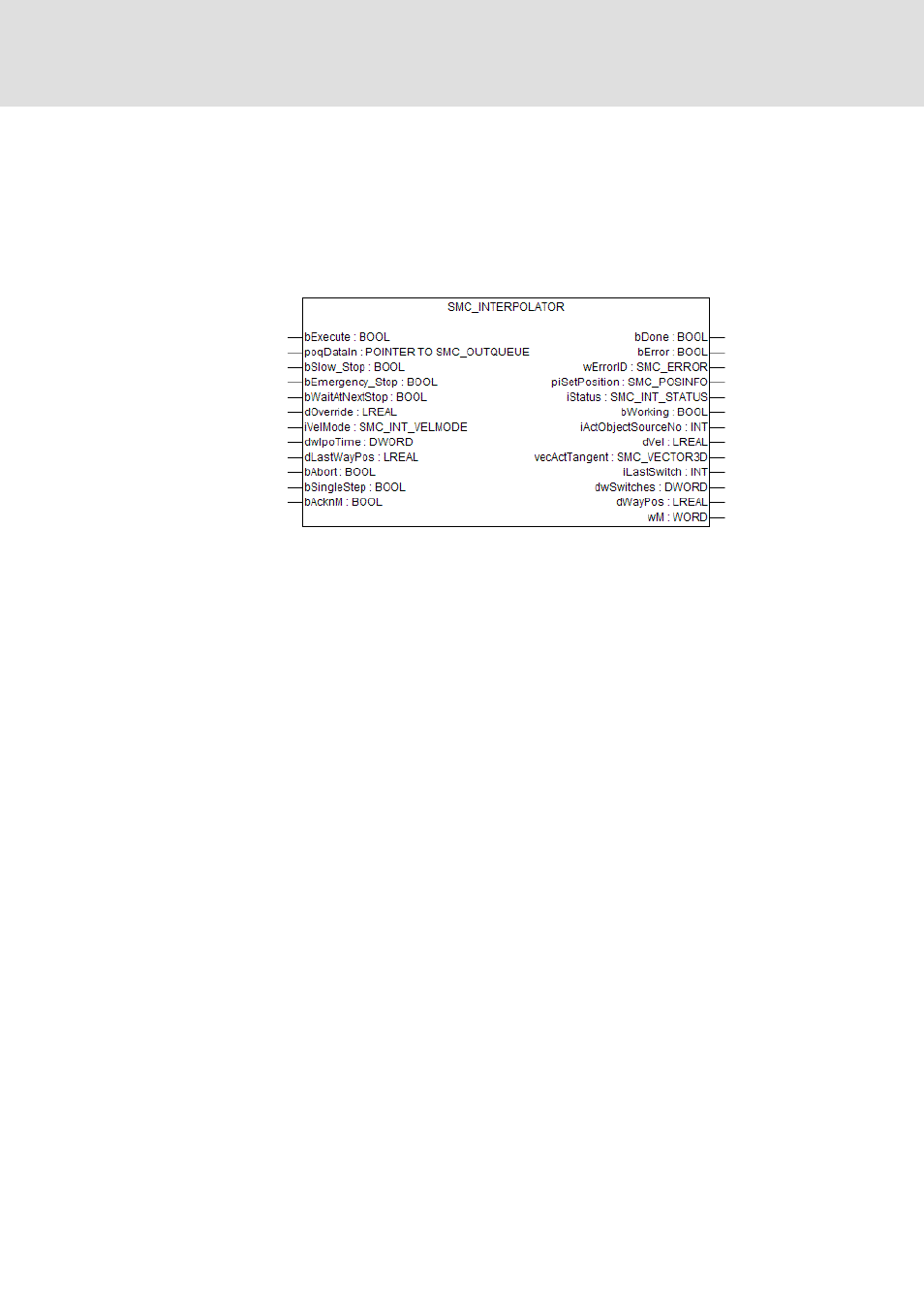
SMC_Interpolator
The SMC_Interpolator program organisation unit (SM_CNC.lib) is used to convert an
existing continuous path described by GEOINFO objects into discrete path position points,
taking the defined velocity profile and time pattern into account. These position points will
then typically be transformed by the IEC program (into drive axis positions, for example)
and sent to the drives via the Drive Interface.
Inputs (VAR_IN)
bExecute: BOOL
The program organisation unit executes a reset and starts the interpolation if a rising edge
is detected at this input.
poqDataIn: POINTER TO SMC_OUTQUEUE
This input points to the SMC_OUTQUEUE structure object that contains the
SMC_GEOINFO objects of the path to be interpolated; typically it points to the poqDataOut
output of the preceding program organisation unit SMC_CheckVelocities.
bSlow_Stop: BOOL
If this input has been set to FALSE (default), the path is travelled on without interruption.
TRUE causes the SMC_Interpolator to reduce the speed to 0 in accordance with the set
speed profile (byVelMode s. u.) and the maximum deceleration of the current GEOINFO
object (dDecel s.u.) and to wait until Slow_Stop is set to FALSE again.
bEmergency_Stop: BOOL
This input is set to FALSE by default. If it becomes TRUE, SMC_Interpolator will execute an
immediate stop, i.e. the current position will be retained. The velocity will thus be
immediately set to 0.
bWaitAtNextStop: BOOL
If this input is set to FALSE (default), the path will be traversed without stopping. On TRUE,
SMC_Interpolator will retain the position at the next regular stop, i.e. at position points
where the velocity is 0, typically at path angles, and will trigger a delay until
bWaitAtNextStop is reset to FALSE.