11 smc_interpolator2dir, Smc_interpolator2dir, L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 192
DMS 5.2 EN 03/2011 TD17
L
192
L-force | PLC Designer - SoftMotion
The SM_CNC.lib library
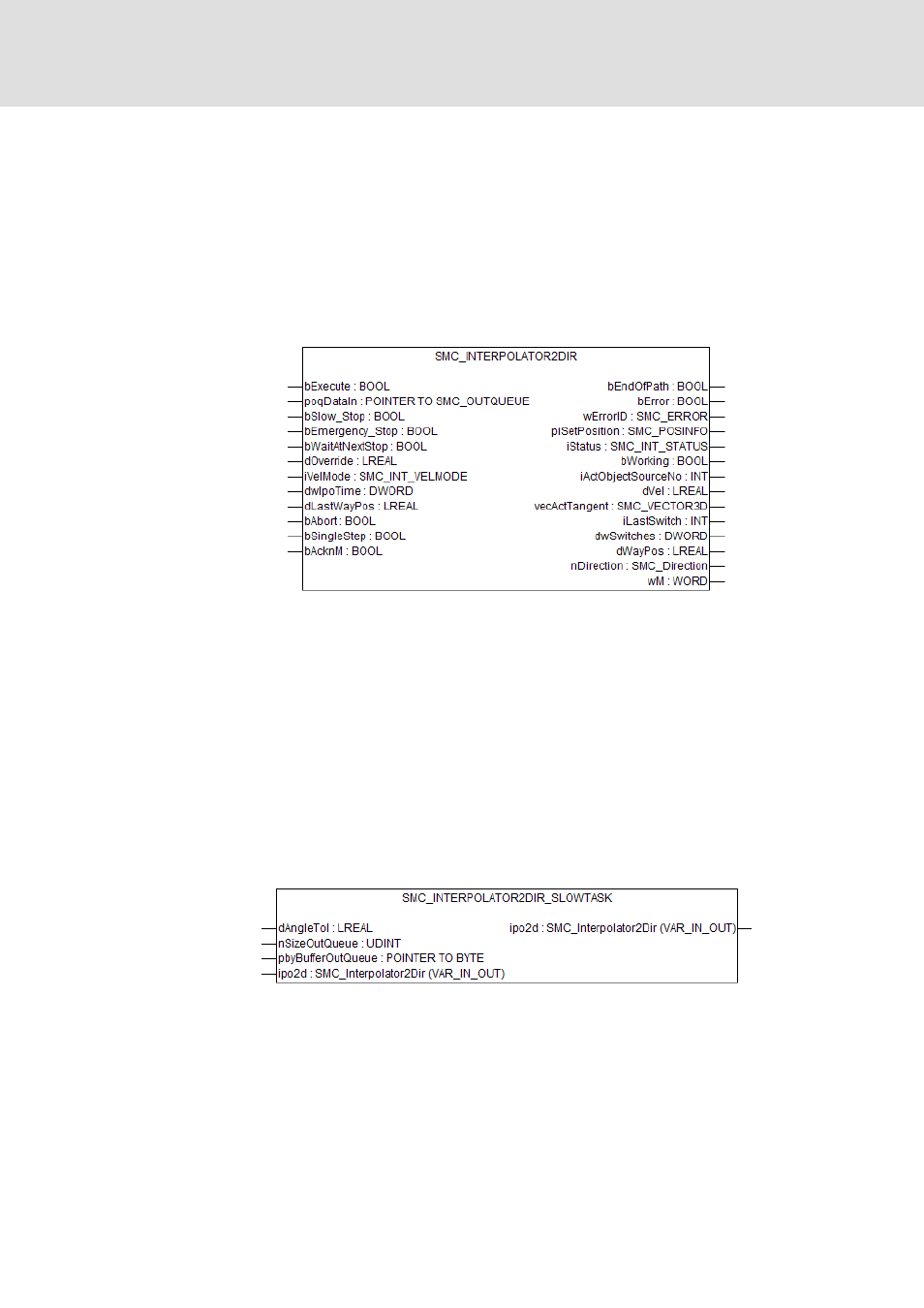
SMC_Interpolator2Dir
7.11
SMC_Interpolator2Dir
In terms of its function and how its inputs and outputs are assigned, this program
organisation unit is the same as the SMC_Interpolator function POU. The only difference is
that SMC_Interpolator2Dir can also interpolate a path in reverse.
For this purpose, a negative value is assigned to the dOverride input, whereupon
SMC_Interpolator2Dir interpolates in negative direction. The analogue speed input of a
handwheel can be at this input so that the user can travel forwards and backwards at any
speed.
Additional inputs and outputs (VAR_IN_OUT)
nDirection: SMC_Direction
This program organisation unit shows the direction in which it is currently moving.
Possible values: IPO_positive, IPO_negative and IPO_standstill.
The following preconditions must be met in order for this program organisation unit to be
used:
The entire path must fit in poqDataIn. As the program organisation unit must move
forwards and backwards alternately, the complete path must be available in the
memory.
An additional program organisation unit, SMC_Interpolator2Dir_SlowTask, is called:
This program organisation unit is responsible for generating the reverse path. It has been
split off from SMC_Interpolator2Dir, and thus can be swapped to a lower-priority task in
the case of lower-performance automation systems that are being stretched to the limit.