2 smc_teachcoordinatetransformation, Smc_teachcoordinatetransformation – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 195
DMS 5.2 EN 03/2011 TD17
L
195
L-force | PLC Designer - SoftMotion
The SM_CNC.lib library
Function blocks for spatial transformation processes
7.12.2
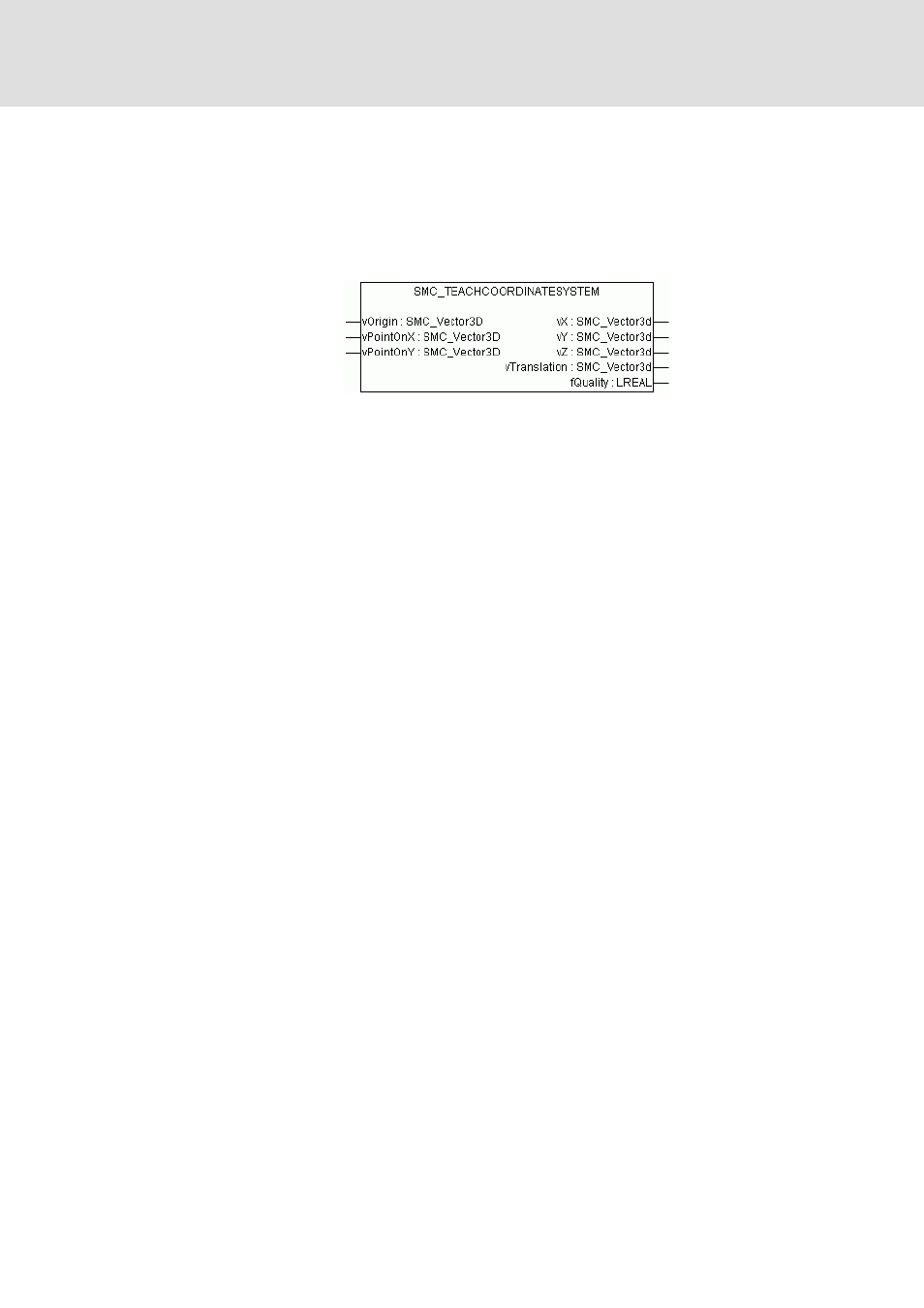
SMC_TeachCoordinateTransformation
This POU of SM_Trafo.lib helps the user to calculate the vectors of a new coordinate system
which he wants to "teach". As inputs the source of the new coordinate system and a
random point are transferred to the x and y axis, respectively. As outputs the POU provides
the translation vector and the unit vectors of the new coordinate system. Furthermore it
calculates the quality of the input parameters (angle between x and y axis should be 90°).
Inputs (VAR_IN)
vOrigin: SMC_Vector3D
Source position of the new coordinate system.
vPointOnX, vPointOnY: SMC_Vector3D
Outputs (VAR_OUT)
Position of a point on the X or Y axis.
vX, vY, vZ: SMC_Vector3D
Unit vectors of the new coordinate system.
vTranslation: SMC_Vector3D
Translation vector: Vector from the old coordinate source to the new one with reference to
the old coordinate system.
fQuality: LREAL
Quality of the input parameters; value from 0 to 1, where 1 = optimum (vX, vY are
orthogonal), and 0 = vX and vY are invalid