L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 187
L-force | PLC Designer - SoftMotion
The SM_CNC.lib library
SMC_Interpolator
187
L
DMS 5.2 EN 03/2011 TD17
As in the case of the override, an online change is not accepted until an acceleration or
braking phase has been concluded.
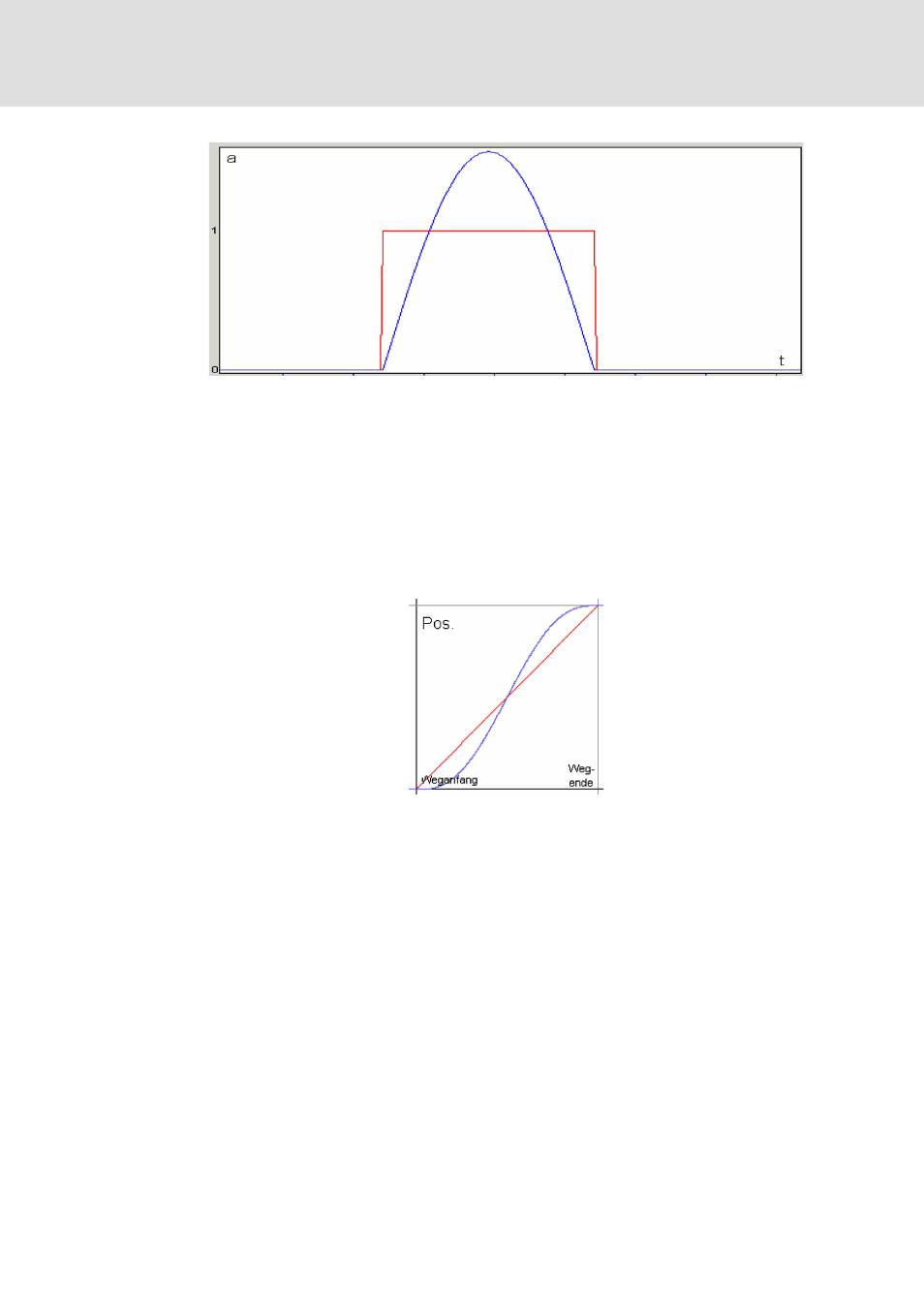
In order to interpolate the additional axes in sigmoidal form (blue, see sketch) rather than
linearly (red), the corresponding bits must be set in the wSProfile variable of piStartPos for
the current path object, irrespective of the byVelMode input of SMC_Interpolator. Now the
additional axis will not be interpolated linearly relative to the path length in the X, Y, Z
space, but as a polynomial function of this path length, resulting in a sigmoidal profile for
the axis position, which has a velocity and acceleration of zero at the start and end of a
path segment.
dwIpoTime: DWORD
This input, which must be set for each call, contains the cycle time in μsec.
dLastWayPos: LREAL
This input allows the user to measure the length of the path that is covered by the
interpolator. The dWayPos output is the sum of dLastWayPos and the distance covered in
the current cycle. If dLastWayPos = 0, dWayPos shows the length of the current path
segment. If dLastWayPos is set to the same value as the dWayPos output, dWayPos will
always be incremented by the current path segment and the total length of the path
covered is obtained. During this process, dLastWayPos can be (re)set to 0 or another value
at any time.
bAbort: BOOL
This input aborts processing of an outline.