L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 186
DMS 5.2 EN 03/2011 TD17
L
186
L-force | PLC Designer - SoftMotion
The SM_CNC.lib library
SMC_Interpolator
dOverride: LREAL
With the help of this variable, it is possible to make use of the override. Values are greater
than 0.01 are permissible. The override is multiplied in relation to the set speed of the
individual objects and thus make it possible to increase or reduce the set speed. The effect
of an override of 1 (default), for example, is that the programmed set speeds are executed
whereas an override of 2 would double them.
Although the override can be modified at any time, any change will only be applied if no
acceleration or deceleration is currently in progress.
iVelMode: SMC_INT_VELMODE
This input defines the velocity profile. The value "TRAPEZOID" (default) produces a
trapezoidal velocity profile, whilst "SIGMOID" produces an S-shaped, or sigmoidal, profile.
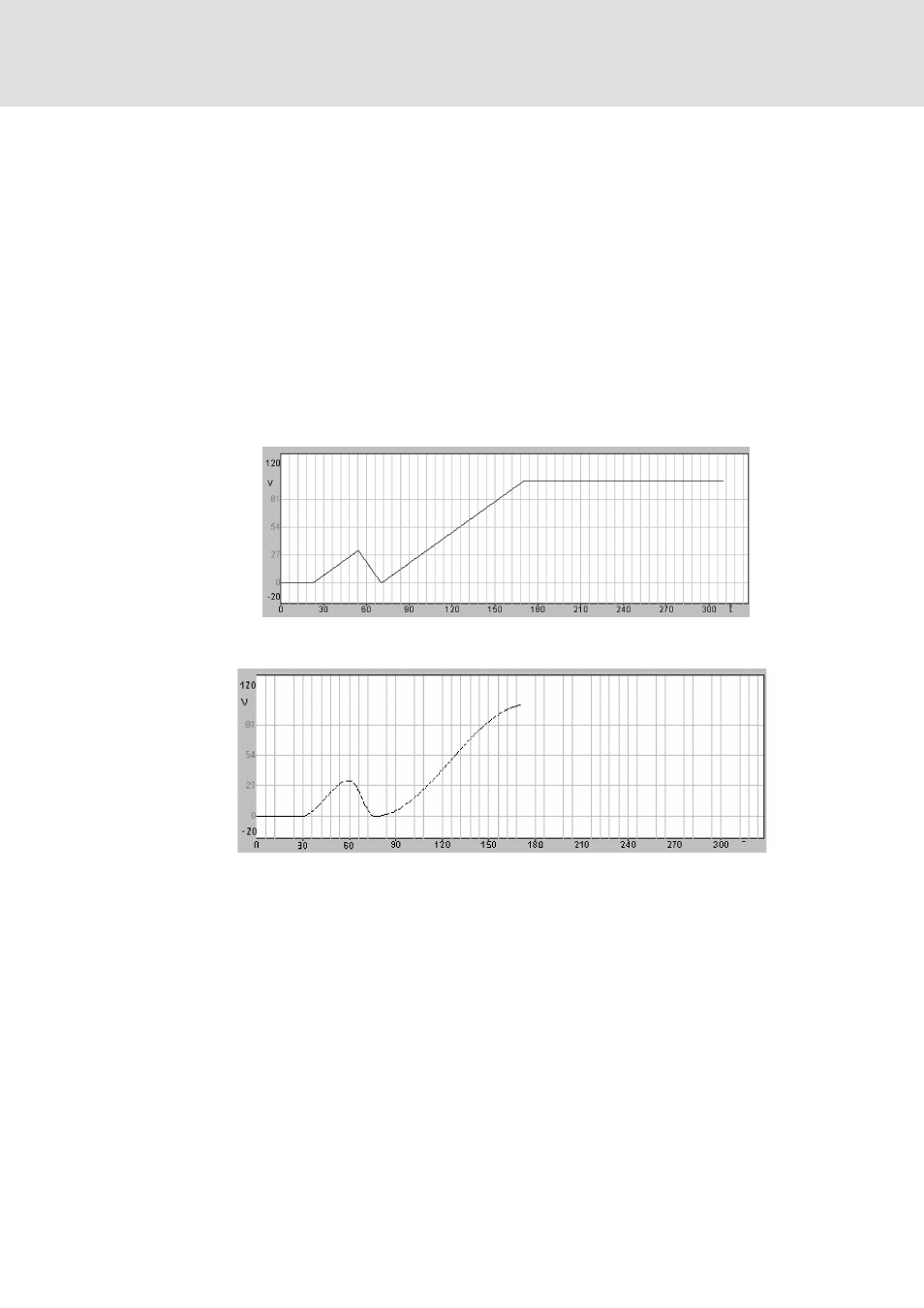
Example of a trapezoidal velocity profile (Vel_Mode = 0):
Example of a sigmoidal velocity profile (Vel_Mode = 1):
In the examples shown above, the maximum acceleration (Accel) value is lower than the
maximum deceleration (Decel). This causes the different gradients of the velocity curve at
acceleration and deceleration.
The advantage of a sigmoidal velocity profile is that, in contrast to the trapezoidal version,
the associated acceleration is continuous, thereby relieving strain, especially for heavy
machines. The trade off for this is a slightly increased calculating time.
Because the S-shaped speed profile (blue) is such that a changeover to the trapezoidal
profile (red) does not result in any change of the time needed to complete travelling on the
path, the careful increasing of acceleration at the beginning and end must be balanced out
by higher acceleration in the middle. Here, it must be ensured that the maximum
acceleration or braking programmed in the Geo objects is not exceeded by more than a
maximum factor of p/2: