21 mc_velocityprofile, Mc_velocityprofile, L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 139
DMS 5.2 EN 03/2011 TD17
L
139
L-force | PLC Designer - SoftMotion
The SM_PLCopen.lib library
POUs for the motion control of individual axes
6.2.21
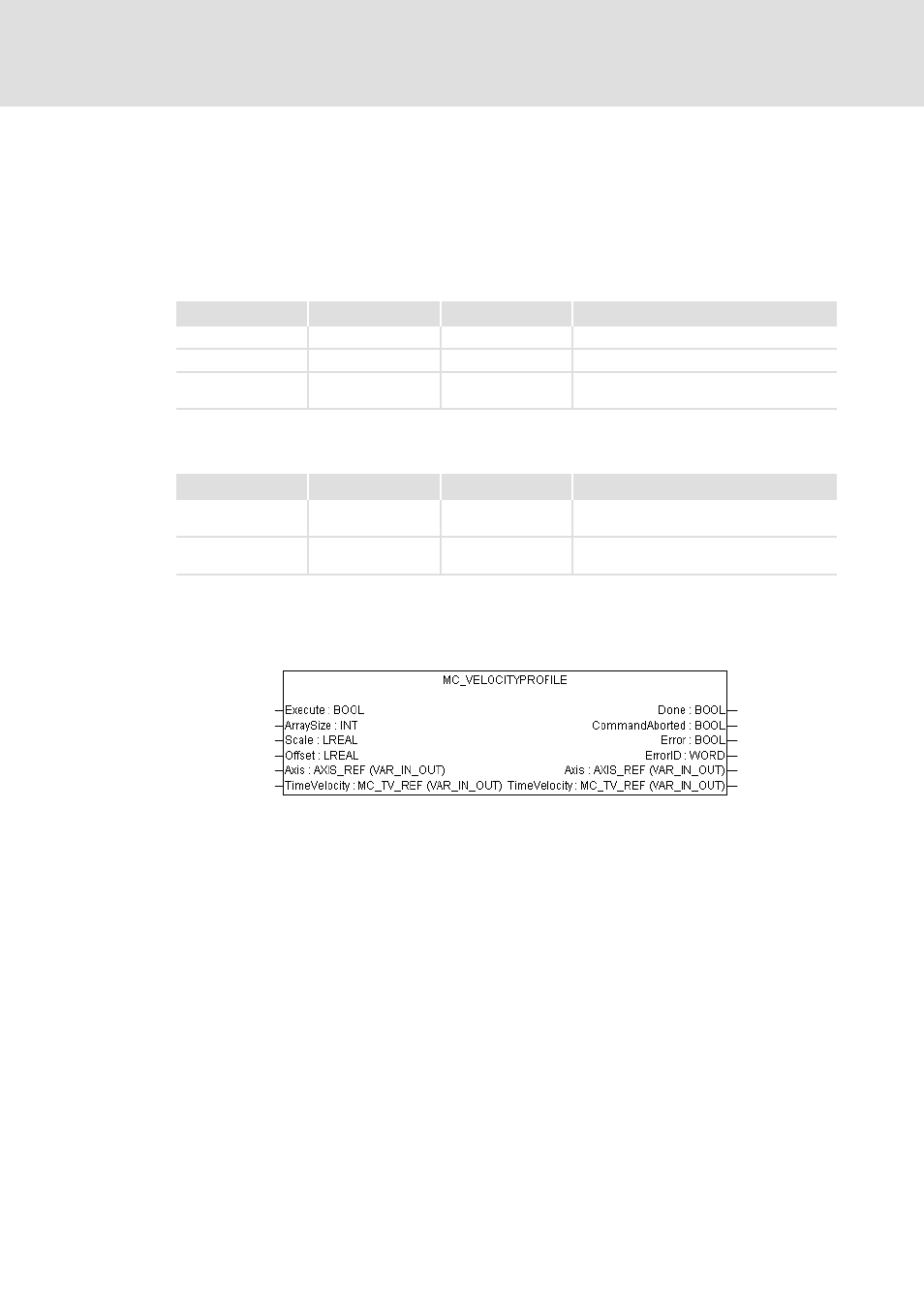
MC_VelocityProfile
This program organisation unit from SM_PLCopen.lib functions in a similar way to the
MC_PositionProfile program organisation unit. Here, however, the position points are
defined by their velocities in the input variables of the MC_TV_REF structure.
MC_TV_REF variables
MC_TV variables
The program organisation unit uses the defined position points to create a continuously
differentiable curve composed of parabolas. The axis position is calculated from the start
position and the integral over velocity.
Variable
Type
Initial value
Description
Number_of_pairs
INT
0
Number of profile position points
IsAbsolute
BOOL
TRUE
Absolute or relative positions
MC_TV_REF
ARRAY[1..100] OF
MC_TV_REF
Position points
Variable
Type
Initial value
Description
delta_time
TIME
T#0s
Period of time between arrival at the
previous position point and this one
velocity
REAL
0
(Absolute/relative) velocity of the position
point