1 "module parameters" dialog, 2 "candrive" dialog, L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 25
DMS 5.2 EN 03/2011 TD17
L
25
L-force | PLC Designer - SoftMotion
The SoftMotion drive interface
Control configuration for SoftMotion
3.1.3.1
"Module parameters" dialog
All settings of the
dialog can also be viewed and altered in the Module
parameters dialog:
3.1.3.2
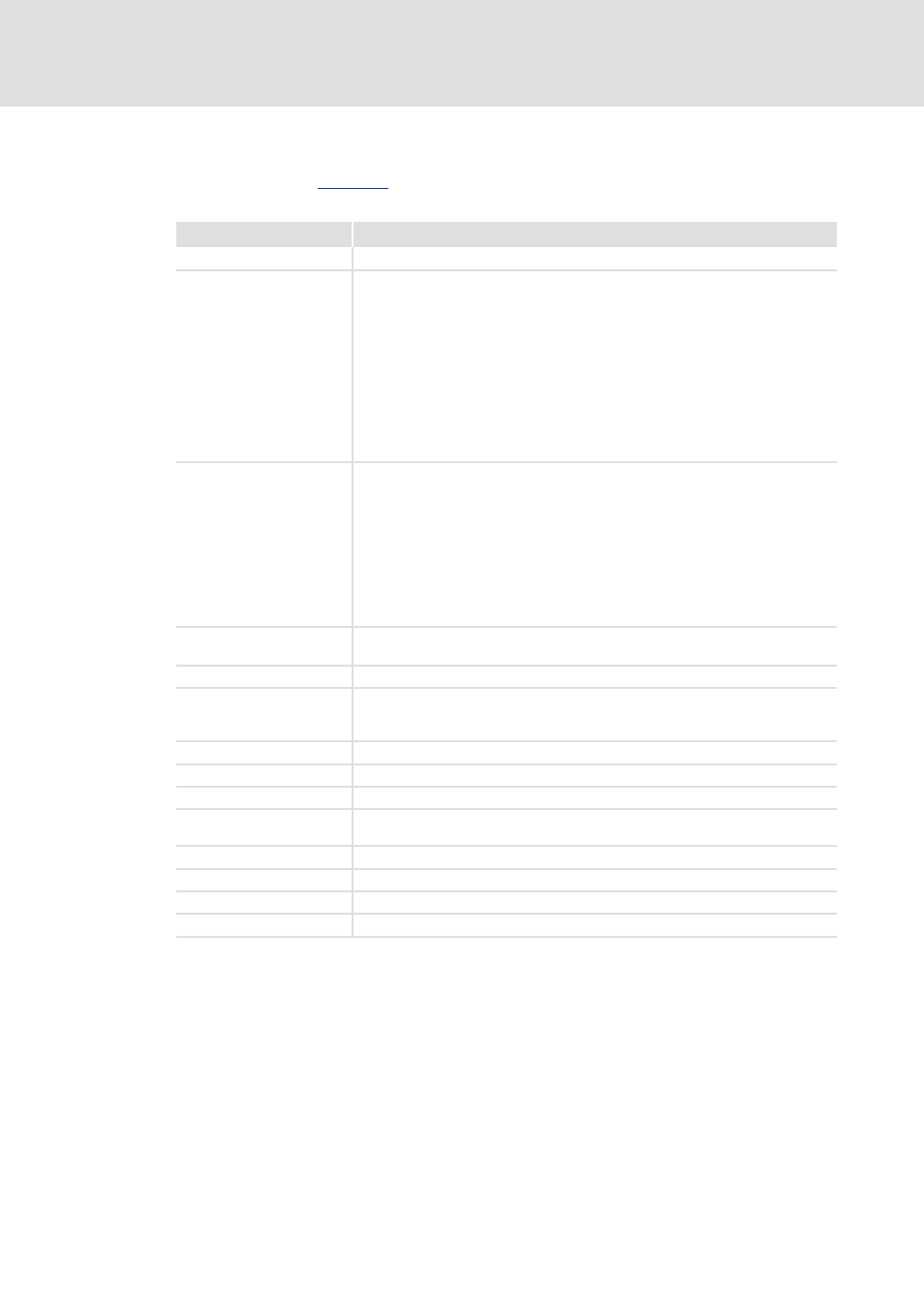
"CANDrive" dialog
In the CANDrive dialog parameters which are to be written to the drive during acceleration
can be entered. They can be stored in XML files or loaded from them.
Parameter
Description
wDriveId
ID of the drive in the AxisGroup (WORD)
wControlType
Predefined control and feedback types (WORD); the following options are provided:
(
TOR -> ---
VEL -> VEL
VEL -> POS
POS -> POS
POS, VEL -> POS, VEL
VEL -> ---
CONFIGURABLE
Torque -> ---
Speed -> speed
Speed -> position
Position -> position
Position, speed -> speed,position
Speed -> ---
Manual configuration via:
• wCyclicDataS1, ..S2, ..S3 and
• wCyclicDataR1, ..R2, ..R3 (s.u.)
wCyclicDataS1
wCyclicDataS2
wCyclicDataS3
wCyclicDataR1
wCyclicDataR2
wCyclicDataR3
Definition of the transmitted data (..S..) and feedback data (..R..) if wControlType is
set to "CONFIGURABLE". Options depend on the corresponding drive element.
Basically the following can be set:
• Act/SetPosition:
position
• Act/SetVelocity:
Speed
• Act/SetTorque:
Torque
• Act/SetCurrent:
Current
• Act/SetUserDef:
User-specific definition
dwRatioTechUnitsDenom
iRatioTechUnitsNum
Denominator and numerator for conversion factor of bus data in technical units [u]
(DWORD or INT)
iMovementType
Motion type; options: linear or rotary
fPositionPeriod
Period for rotary axes in technical units
Please note that, converted into increments (by "dwRatioTechUnitsDenom" and
"iRatioTechUnitsNum"), it must not be greater than 80000000
hex
(2147483648
dec
).
fSWMaxVelocity
Maximum speed for software check
fSWMaxAcceleration
Maximum acceleration for software check
fSWMaxDeceleration
Maximum deceleration for software check
bSWLimitEnable
Switch on software position check (linear drives only) which causes the axis to be set
in the error status if it exits the position window.
fSWLimitNegative
Negative position limit (linear drives only)
fSWLimitPositive
Positive position limit (linear drives only)
eRampType
Speed profile type (trapezoidal, sigmoidal, parabolic)
fRampJerk
Jerk for the speed profiles "sigmoidal" and "parabolic"