22 mc_accelerationprofile, Mc_accelerationprofile, L-force | plc designer - softmotion – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 140
L-force | PLC Designer - SoftMotion
The SM_PLCopen.lib library
POUs for the motion control of individual axes
140
L
DMS 5.2 EN 03/2011 TD17
6.2.22
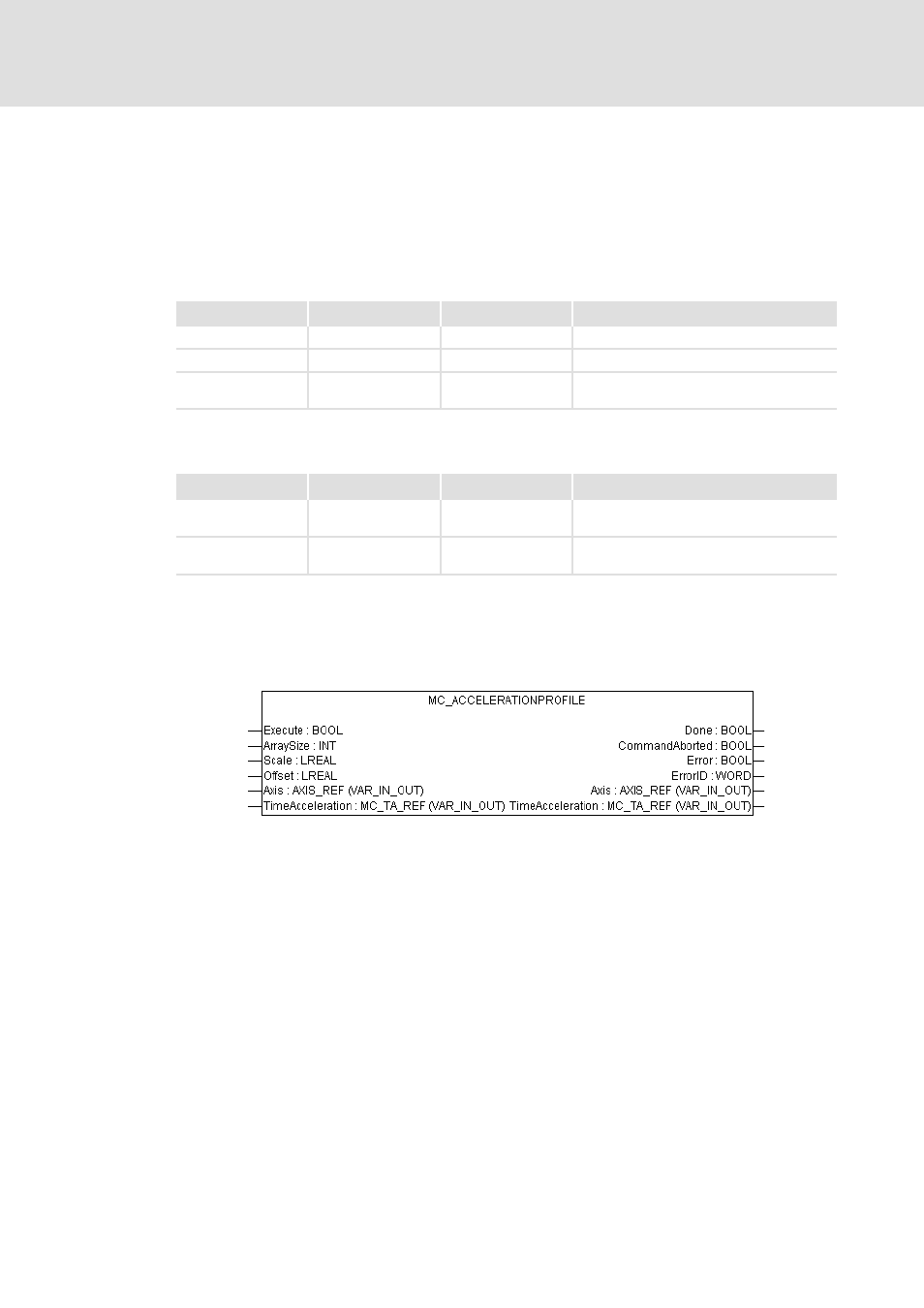
MC_AccelerationProfile
This program organisation unit from SM_PLCopen.lib functions in a similar way to the
MC_PositionProfile program organisation unit. Here, however, the position points are
defined by their accelerations in the input variables of the MC_TA_REF structure.
MC_TA_REF variables
MC_TA variables
The program organisation unit uses the defined position points to create a continuous
curve composed of lines. The velocity of the curve results from the velocity at the start of
the profile and the integral over acceleration. The axis position is calculated from the start
position and the integral over velocity.
Variable
Type
Initial value
Description
Number_of_pairs
INT
0
Number of profile position points
IsAbsolute
BOOL
TRUE
Absolute or relative positions
MC_TA_Array
ARRAY[1..100] OF
SMC_TA
Position points
Variable
Type
Initial value
Description
delta_time
TIME
T#0s
Period of time between arrival at the
previous position point and this one
Acceleration
REAL
0
(Absolute/relative) acceleration of the
position point